随着PP-CEM 2.0 occupancy network的泛化,occupancy的性能也在不断进步,PP-CEM针对Lidar(可选)/4D Radar(newest firmware)点云和图像像素的全向精准占据4D数字环境刻画,将进一步与BEV➕Transfomer相辅相成,极大提升驾驶周围数字环境到一个全新的台阶。
有几个有意思的小场景,开车门的车旁边还站着行人,新的occupancy network占据网络对这些场景🎬可以精准的刻画,这将极大的释放感知预测和规划决策的上限!

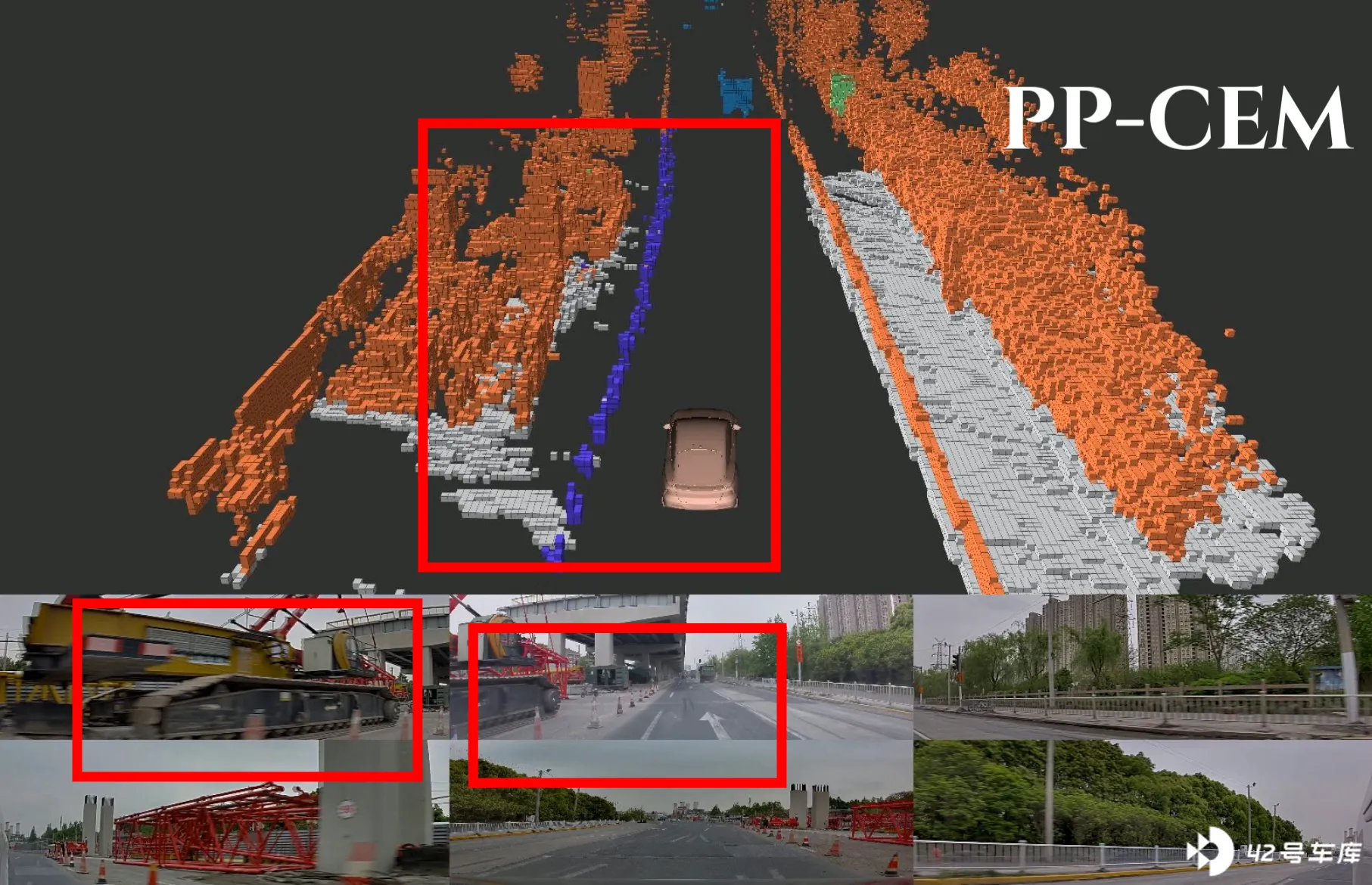
同样对于大型的异形施工车辆,这是感知样本中分布比较稀疏的类型并且个体化差异也比较大,在occupancy network中依然可以精准的刻画描绘,也为感知预测和规划决策提供了丰富的上限空间!
还有路口牵着宠物的行人走在拉着货物的三轮车场景,走走停停甚至宠物的回驻也是很常见的场景,通过occupancy network 可以精准的刻画描绘,也为感知预测和规划决策提供了丰富的上限空间!
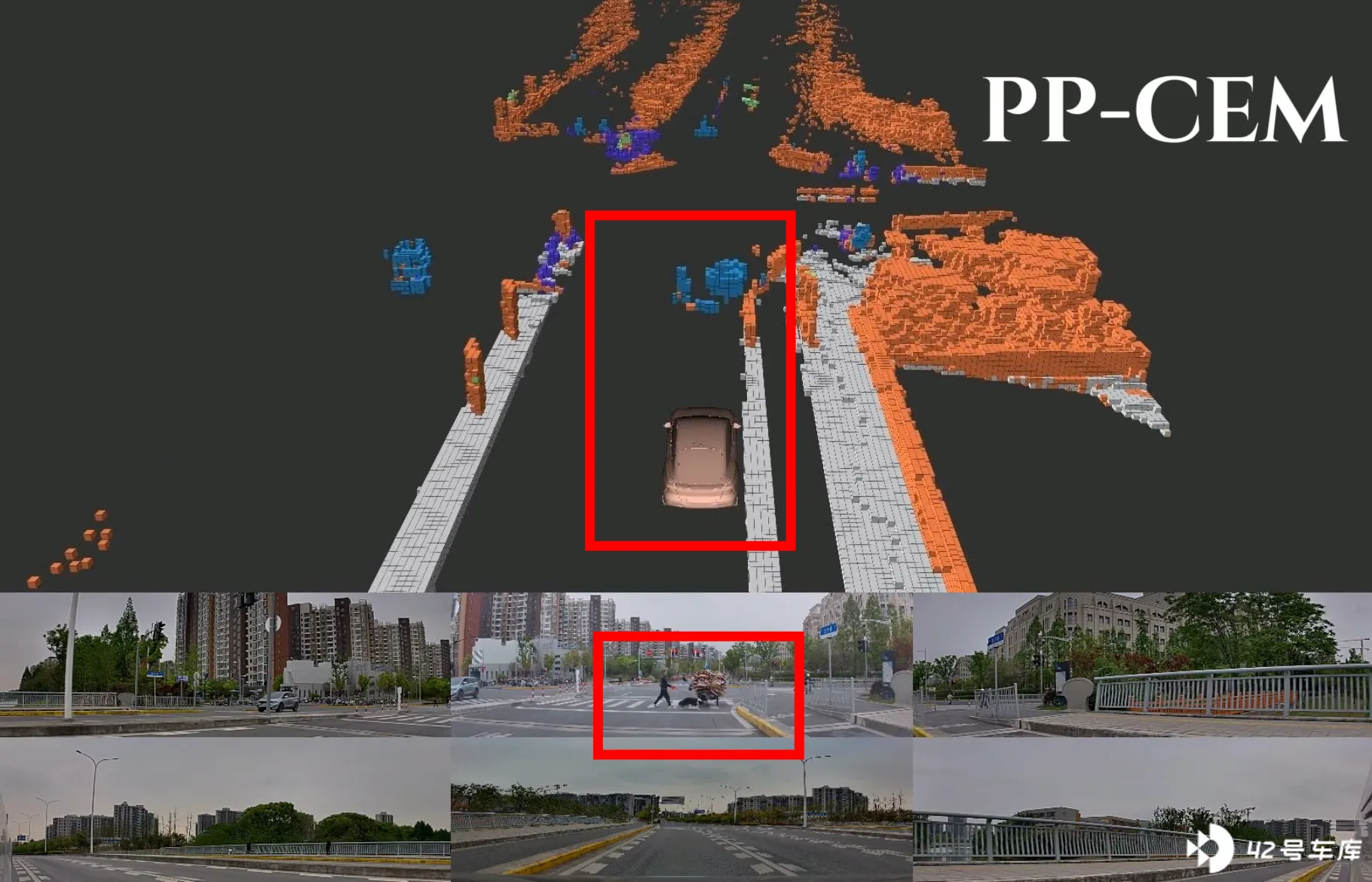
这一切将通过组合全向视觉完善的全像素感知、业内领先的4D毫米波点云智能感知以及可选的激光雷达感知,进行深度融合获得。
PP-CEM 2.0也会不断和用户分享技术栈的演进。