作者 | 朱世耘
编辑 | 邱锴俊
「 如果下半年能有体验不错的通勤模式落地,我会很惊讶。 」自动驾驶技术专家 Brian 向《电动汽车观察家》表示,「 但如果有人做出来了,确实能解决 80%的出行需求。 」
在特斯拉的 NOA(导航驾驶辅助)概念之后,今年中国企业提出了智能驾驶的「通勤模式」——在通勤场景下的端到端智能驾驶辅助。
今年 3 月,小鹏汽车首个提出「通勤模式」概念,并于 6 月底在小鹏 G6 上市发布会上将其命名为 Ai 代驾;同样在 6 月,大疆发布「记忆行车模式」将落地宝骏云朵;理想汽车则直接命名为通勤 NOA;6 月 27 日,理想汽车在北京望京地区通勤 NOA 功能测试,并表示将在下半年开始上线……
覆盖用户 80%出行场景需求的通勤模式,是解决自动驾驶商业模式困境的杀手级应用?还是城市 NOA 落地难的权宜之计?
无图?还不行
通勤模式折射出当下中国玩家在量产自动驾驶过程中,难以「脱图」的现实困境。
尽管目前小鹏、大疆、理想都未公布其「通勤模式」的具体技术方案,但《电动汽车观察家》在采访中了解到, 多趟建图+记忆人类驾驶员行驶轨迹是通勤模式的底层技术概念。
零束科技智驾产品线负责人张睿在焉知智能电动汽车年会上也明确表示:「记忆行车采用单趟一键建图、多趟对齐的方式来实现特定场景下,一个低成本方案的出行体验。」
所谓「低成本」对应的自然是高成本的高精度地图。
按照四维图新公布的数据,一公里高精地图的采集成本约为 1 万元。其目前已有 30 万公里高精地图的维护、更新费用为 40-50 亿元,成本、鲜度和覆盖范围限制着高精地图从高/快速路走向城区路段。
但另一方面,高精地图的好是「谁用谁知道」,其大幅降低了自动驾驶系统完成「定位、路径规划和驾驶决策」这些核心任务的难度等级。
在信息丰富、高确定性的高精地图的帮助下,车辆只需将全球定位系统(GPS)、惯性测量单元(IMU)、轮速计、激光雷达、摄像头等传感器获得的数据与高精地图数据比对,即可获得车道级的精准定位。
脱离高精地图,意味着车辆仅能够依靠上述传感器,在车道线模糊/消失、道路被遮挡、交通标示不一定清晰的「混乱」现实中进行车道级的定位。因为「站错」车道对之后的路径规划将是灾难性的错误。
基于高精地图精确尺寸的超视距地图环境信息,车辆在出发前,就能将「从远通桥上机场高速」这样模糊的导航信息,捆绑成为「从远通桥右侧两车道,进入一车道分岔路,进入机场高速左侧两车道」的精确路径规划, 进而执行时的 轨迹规划 可以简单为拆解成横向和纵向。
脱离高精地图,意味着车辆要捆绑「噪声」众多的感知实时地图和导航路径,而之后的驾驶决策就要在这样不确定的环境中做出。
「无图」意味着自动驾驶系统的感知、定位、规划和决策能力上限要大幅提升。但显然,目前自动驾驶系统的能力提升速度追不上城市场景的难度增长速度。「图」仍是当下自动驾驶玩家量产时的必选项。

目前除特斯拉之外,各家已经推送的城市领航功能仍是有图方案。
四维图新 CEO 程鹏公开表示:「 终端(车企)现在提 SD Pro,即 SD 地图(标准地图,精度 10 米左右)加上 HD(高精地图,精度 10 厘米左右)的车道连通性等信息」。使用 SD Pro 地图时,高精地图主要在云端用于训练,需要时将其赋分给车端的 SD 地图。
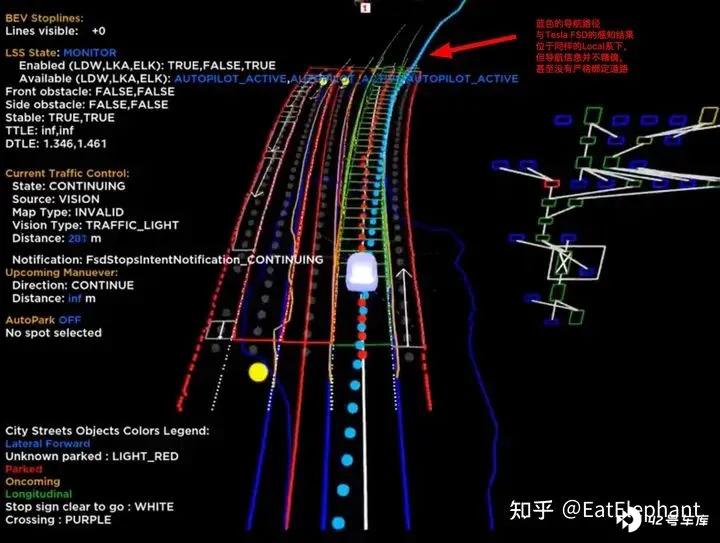
值得注意的是,即使是从无图出发,积累了极高的感知和定位 Know how 的特斯拉,目前在拥挤的城市路况中也表现得颇为挣扎。
城市 NOA 到无图之间差多少个通勤模式?
通勤模式则试图为仍在提升感知和定位能力的中国自动驾驶量产玩家们,提供一条当下就能「进城」的捷径: 通过多趟建图和记忆驾驶员轨迹,不依靠高精地图实现定位和路径规划。
如果将自动驾驶系统的工作过程简单拆解,可分为感知和决策两大部分。
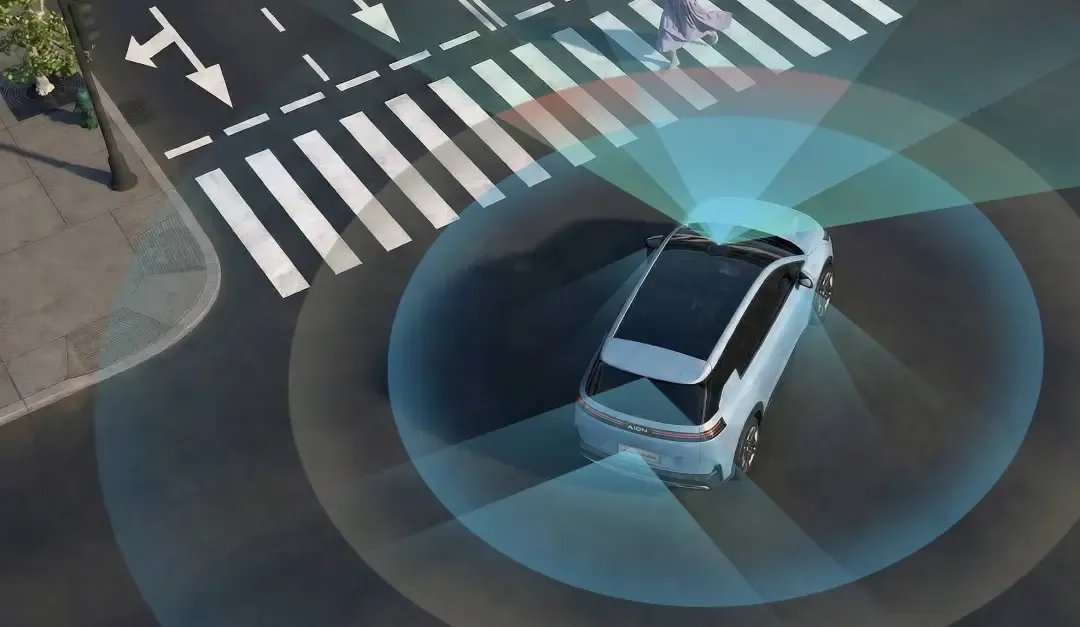
感知是基于传感器数据,通过场景重建、要素识别、关键目标重组和自车重新定位,来输出包括道路全局信息和自车位姿的「可行驶空间」。
决策则基于可行驶空间来进行路径、运动轨迹的规划,整个底盘作为执行器,执行这些决策规划命令。

有高精地图时,感知系统可将「可行驶空间」构筑在高精地图精确稳定的虚拟空间中,难度相对较小。没有高精地图时,感知系统的「可行驶空间」需要无限逼近的现实世界,决策系统才能做出正确的规划,在「混乱」的城市路况下实现难度极高。

通勤模式则在有图和无图之中构建一个「中间带」。
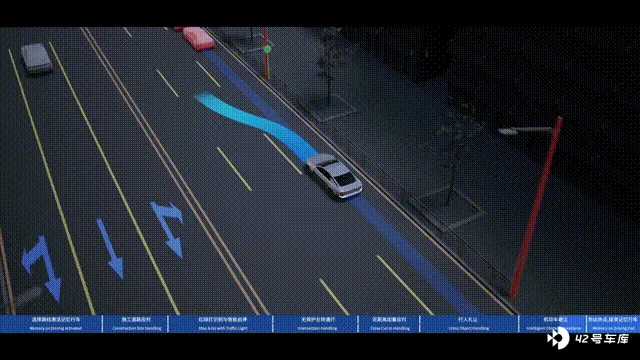
具体而言,「通勤系统」在同一路段多趟往返时,完成自车建图、环境目标语义识别的工作,同时录制人类驾驶员在该路段的行驶轨迹:
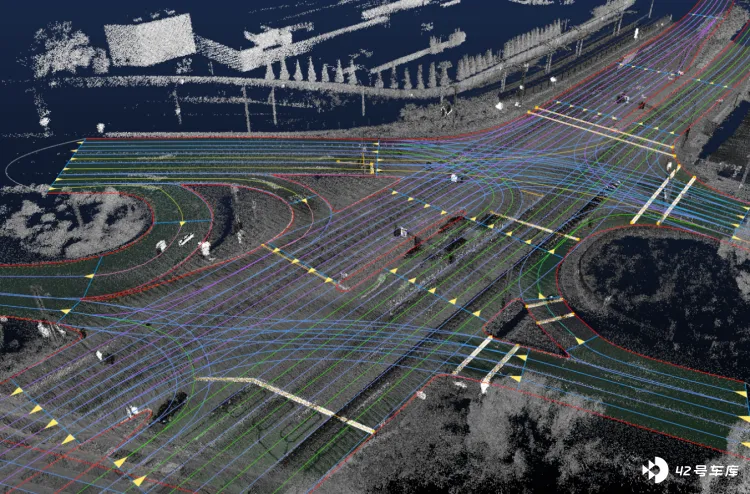
利用自身感知系统(摄像头、激光雷达、毫米波雷达、GPS、IMU、轮速计)数据输入,构建起通勤路段信息丰富的地图并永久存储,获得局部路段的全局信息;
对路段中的关键要素进行语义识别记忆,如一段绿化带、一个限速牌、一个红绿灯、一个路口等。将这些检测到的、描述的和定位的地标永久储存,以描述车辆轨迹的相对位置;
人类驾驶员的行驶轨迹则直接赋予了系统一条车道级的路径和运动轨迹。
基于上述信息,车辆便能够像使用高精地图一样,通过检测、对齐目标,恢复车辆相对于存储轨迹的姿态。
相比于目前重建图的方案 , Brian 认为,「通勤模式」应以记忆轨迹的为主,以多趟建图为辅的原则来设计系统实现。
其中记忆轨迹不应仅是一组全局坐标下经纬度姿态组成的点串,同时还应包含在轨迹不同位置自车驾驶的动作信息以及他车和周围环境的信息等。
记忆轨迹一方面帮助模型直接联合输出与静态道路元素融合一起的导航路径轨迹;另一方面沿途记忆的各类动作和环境信息可辅助规控在一定的不确定性中来进行行为决策。
而且,多条被跑通的通勤路线组合后,就可能为城市领航功能落地提供「底图」。 小鹏表示,AI 代驾的路线可以分享给其他用户;理想则表示,通勤 NOA 密集跑通的区域,将能够更快落地城市 NOA。
一位高精地图专家告诉《电动汽车观察家》: 车端传感器多趟建图可实现亚米级的精度,可以满足低速情况下,城市自动驾驶所需。
均胜电子副总裁郭继舜也表示, 通 勤模式可以通过构建语意地图,帮助企业无需专门投入,通过众包模式实现地图数据库的动态维护工作,降低企业的地图维护成本。而且通勤模式如果成为众多用户高频使用的驾驶辅助功能,也将通过数据闭环为企业提供更多的感知决策所需的训练数据。
通勤模式解不了城市领航的难
想法很好,但果真能落地吗?
或许是因为算法是进城最需要提升能力上限的部分,在《电动汽车观察家》的采访过程中, 高精地图和工程专家都看好通勤模式,感知、决策的算法专家却普遍对能否落地及落地可用性抱有疑虑。
疑虑一方面来自对多趟建图质量的怀疑。
在时间上,地图采集车多在凌晨、半夜等车少路空的时段出动, 通勤车则多在路况拥堵的上下班时段,众多动态物体会遮挡场景导致建图质量急剧下降。
在路径上,地图采集车会历便采集路段的所有路口,以获得完整的地图信息。 通勤路线建图通常无法覆盖所有车道和路口通行方向,对预测其它路口方向的他车轨迹、规划控制的应变能力造成严重影响。
此外多趟建图通常采用小图拼大图的方式。高精地图在制图过程中也常碰到两个区域无法对齐的情况。 所以通勤模式建设的地图最终能否在合理的成本下,拼接成为一定区域内自动驾驶所需的地图,也值得怀疑。
疑虑的另一面是通勤模式的增益主要在提升静态信息上,而自动驾驶系统在城市中更大的风险来自于动态信息。

即使拥有很好的路径规划,但如何与其它交通参与者进行高密度,且安全的互动,是同样跑在城里的通勤模式和城市 NOA 面临的核心难题,也是决定系统体验的关键。
L4 级自动驾驶公司的 BUS 模式,是通过过拟合模型来提升对固定路段内的感知和决策能力,即为一段路打造私有模型。 但通勤模式将落地万千用户,为每条用户的通勤路线建立私有模型,进行过拟合训练显然不现实。
自动驾驶量产玩家或许自己也有这样的顾虑。尽管能解决 80%的出行需求,但目前推出的通勤功能都是随车附送,而非收费模式。
无论是算法还是工程专家都认同,降低对高精地图依赖的通勤模式,有利于降低成本,普及驾驶辅助,让更多人「用上」。但能否「用好」,仍由车端感知和决策能力高低所决定,没有捷径可走。