在第八届长城汽车科技节上,同济大学朱西产教授根据目前辅助驾驶行业现状抛出了一系列观点。

- 如今传统汽车仍然占据着 99% 以上的市场,但投资人对他们已经失去了兴趣。
现在的估值无非往两个方向走:新能源和智能化。再往后发展可能还有共享业务,大家是看好共享汽车业务的。
- 智能座舱
智能座舱已经被大家认可,如果车里没有大屏,没有语音交互,没有导航和娱乐的话,那估计这辆车会很难销售。
但是到今天汽车应该回到本质,所以重中之重是智能驾驶。能够称为 L2+ 的车型是按照 L3 和 L4 去做电子架构的。但是由于法律和产品认证的原因,它们在乘用车领域还是以 L2+ 落地的。今年车展上我们看到的长城的摩卡、小鹏 P5、蔚来 ET7 以及极氪 001、极狐 阿尔法 S ,它们一类是按照 L3 架构做的,一类是按照 L4 架构做的。但是由于它们都还没做标准认证,因为相关法律没有落地,工信部也没有制定认证流程,所以它们还是以 L2+ 上市。
智能汽车中的代表车型就是特斯拉,在批量销售的车中,特斯拉的自动驾驶能力也是最强的。
L2+ 是迈向 L3 和 L4 必然的一个经历。但是 L2+ 恰恰也是安全认定中最模糊的阶段。L2+ 具备 L3 以及 L4 的部分能力,但是没有完全达到。再加上企业的宣传,导致用户在使用时过于相信它的能力。很多边缘场景存在安全隐患,就是我们常说的 Corner Case。
- 关于L2+ 的安全问题
如何渡过 L2+ 这个安全认定模糊的阶段,关键在于用户期望与系统能力之间做平衡。很多用户期待高于系统的能力,这就是危险的源头。不仅中国市场在担心特斯拉的安全问题,欧洲市场也是一样。
智能座舱到今天为止仍然是智能手机的延伸,目前还是太过追求娱乐化,这对智能汽车的安全性其实是有害的。在真正的 L3 与 L4 到来之前,按照「道路交通安全法」的规定,驾驶员除了驾驶以外,其他任何事情都是不允许做的。甚至接打电话都是不允许的。到了 L4 才可以完全脱手。
在 L3 与 L4 被认证之前,娱乐至上的智能座舱其实是在违反「道路交通安全法」的边缘反复试探。
对于汽车来说,安全是 1 ,其他是 0。特斯拉能力固然很强,但是一旦出了安全问题,就会遭遇市场的恐怖期,谈特斯拉色变。中国市场目前还没有特别大的影响,在欧洲市场,特斯拉已经跌出了销量榜前 20。在中国舆论虽然很强,但是购买特斯拉的人依旧很多。
智能座舱并不是智能车的核心,智能驾驶才是。汽车产业的变革,「新四化」已经谈了很久了,但是直到今天,市场是不接受电动汽车的,甚至可以说拒绝。然而面对「碳达峰」、「碳中和」等问题,市场不得不接受。与其碳超标把钱交给欧洲,还不如今天花掉用于研发。
美国重返「巴黎协定」,也在大力发展新能源汽车。在这场变革汽车电动化的变革中,我们中国在政府的顶层设计下,暂时赢了一局。在这其中,动力电池是关键。拜登政府承认 80% 的动力电池市场在中国,但是他们不允许中国赢得这场竞争。汽车新科技的发展已经达到了国家竞争层面的高度。
传统汽车产业,旧的思维模式已经崩塌了,全新的价值体系正在构建。但是「娱乐至上」的汽车也是有必要的,因为如果一辆车「无趣」的话,很难吸引到消费者的注意力。这一点中国市场和欧洲市场反差巨大。 ID.4 就是最好的例子,大众汽车倾尽全力做出了 MEB 纯电平台,但是在国内月销量只有几百辆,在欧洲恰恰相反,销量喜人。
自动驾驶仍然是这一阶段最关键的功能,因为只有真正解放了驾驶员,智能座舱才会变得有意义。
从智能驾驶角度出发的话,目前的 ADAS 也毫无价值。一个摄像头 + 一个毫米波雷达的初级智能,是不受市场欢迎的。手要抓住方向盘的自动驾驶,用户是不接受的。
- 用户期待高于系统能力,才最危险

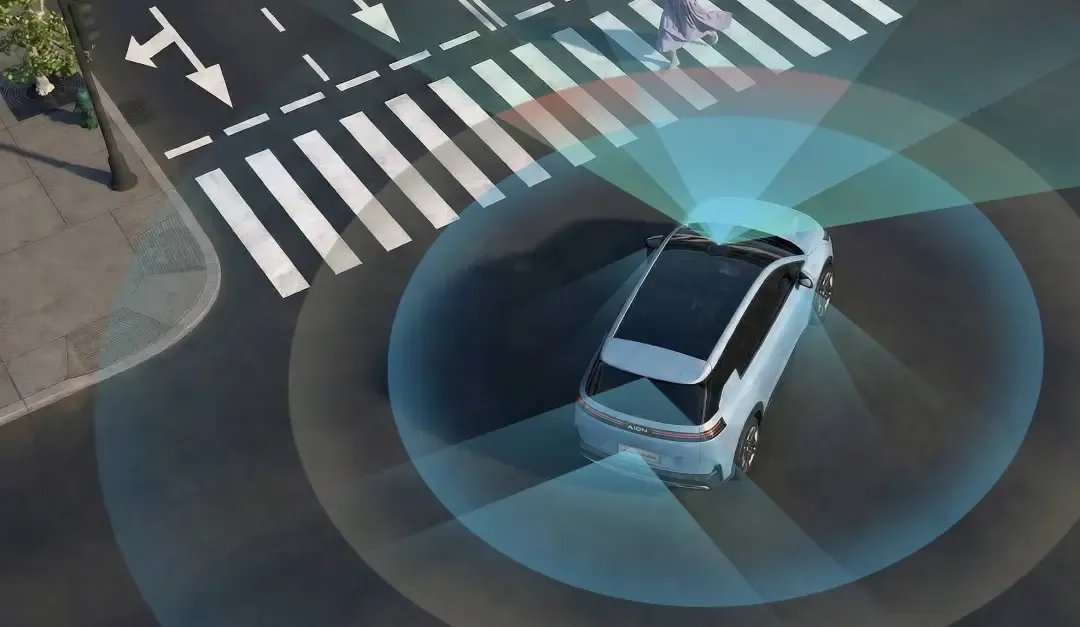
自动驾驶存在 4 类安全场景,分别为:已知的安全场景、未知的安全场景、已知的不安全场景、未知的不安全场景。
L3 和 L4 一定要处理好未知的不安全场景,现在还是有很多用户误解 L2+,在驾驶时深度脱离车辆。同时人与计算机并不在同一个维度,人眼能看到,人类能处理的场景,对于部分 L2+ 的车辆来说还存在难度。
未知的不安全场景事故率并不高,但是因为未知,才会感到恐惧。以特斯拉为首的 L2+ 恰恰落入了恐怖谷。特斯拉的辅助驾驶能力远比一般传统厂商的 ADAS 要强很多,但是却变成了一辆「不安全」的车。原因在于辅助驾驶能力越弱,用户越不抱期待,能力虽然很差,但是用户却认可它的安全性。
在 L1 阶段,用户使用辅助驾驶时会更小心。到了 L2+,反而是一个容易让用户产生误会的阶段,加之厂商的宣传,加深了这种误会。例如特斯拉的 Autopilot、Full Self-Driving,这些词汇具有极大的误导性。当用户期待超过自动驾驶能力,就会非常不安全。
用户的期待是完全脱手,负起驾驶的所有责任,显然还需要车企努力提升车辆的技术能力,去匹配用户期待。
- 如何解决数据问题
自动驾驶的提升是需要过程的,这其中最重要的就是数据。这就要求用户将自己的路途变成「试验场」,才能涵盖更多的「未知的不安全场景」。
所以这就涉及了数据归属问题,目前看来,用户收集的数据归厂家所有更合理。

- 如何走出恐怖谷
尽快的提升自动驾驶的能力,以达到用户的预期。但是在过渡期,抑制企业的宣传是很难的事情,所以用户期待也要适当降低。
危险场景的提示要适当,过度警报会使用户麻痹。因为在用户的使用过程中,用户会摸透系统的能力。即便频繁的警报用户也不以为然,当真正的危险场景出现时,用户不够重视。当然过少的提示也不行。
在朱教授看来,目前阶段智能驾驶安全问题频发,最大的根源在于用户认知与系统能力之间存在偏差。以及现在的发展路线似乎有点「歪」,大家过度在意智能座舱。但是智能座舱本质上应该是在智能驾驶成熟后再被重视的功能。自动驾驶能力越强,发生小概率事件时后果就越严重,另外边缘场景仍然存在。所以核心问题是在当今的过渡阶段,用户期待要和系统能力达到平衡,在平衡中去提升自动驾驶的能力。
🔗信息来源:[第八届长长城汽车科技节]