
从题主的描述就能看出来这大概率是个引战的话题,不过我还是更愿意有理有据地来讨论一下小鹏 P7 买家的 「心态」 问题,就说说 P7 和 Model 3 在我熟悉的自动辅助驾驶上的实际表现吧,供大家讨论。
辅助驾驶的破局者
作为自动驾驶行业的从业人员,在刚参加工作的那两年,我对特斯拉 Autopilot 的辅助驾驶技术抱有极高的景仰之情,为什么呢?
这是因为当年使用特斯拉的辅助驾驶功能后,给我留下了太深刻的印象。简单的激活方式、体验极好的巡航和车道保持能力、新奇的拨杆换道,一项项简单易用、体验极佳的功能,不断地颠覆着我对驾驶的认知,我从没想过自动驾驶居然已经如此成熟。这在当时那个 「新势力才做好 PPT,一个能打的整车厂都没有」 的年代,让我意识到拥有 Autopilot 的特斯拉对其他车企的所谓智能汽车绝对是降维打击。
就在我所在的部门尝试像素级复制特斯拉的 Autopilot 功能时,特斯拉已经悄悄地开始将导航地图和 Autopilot 相结合推出了导航辅助驾驶 NOA(Navigate On Autopilot),并在 2018 年 10 月在美国进行公测。
NOA 可以根据用户输入的导航信息自动进行超车换道和进出匝道,而不是单纯地巡航功能。它将辅助驾驶又带上了一个新的高度,让后来者越来越难以追上特斯拉的步伐。再配合不断完善的自主泊车 / 召唤技术,特斯拉凭借一己之力让公众看到了什么才叫真正的智能汽车。
在推出 NOA 后的两年里,特斯拉除了一些基础的 bug 和日常更新外,开始了一项更为重大的工程 ——FSD(Full Self-Driving)。在 2020 年 10 月,特斯拉向公众推送他们重新设计的 FSD beta,让更新软件后的特斯拉能够具备城市路况自动驾驶的能力。虽然从公测的结果来看 FSD beta 有一些尚未解决的问题,且因为这些问题大规模推送也一直在跳票,但不可否认的是 FSD 将是特斯拉辅助驾驶领域又一大里程碑。
特斯拉就像 2010 年的苹果手机,给了造车新势力和众多整车厂一个可以借鉴的模板。可以这么说,如果不是特斯拉这个破局者,全球范围内的整车厂对辅助驾驶的重视程度必然会大打折扣,L2 级别的辅助驾驶技术根本不会像如今这么普及。
这样就比较容易理解为什么特斯拉 Model 3 会受到一部分年轻消费者的青睐了。他们只是用脚投票,选择了他们心目中最能代表 「智能」 二字的汽车产品。
特斯拉 Model 3 VS 小鹏 P7
特斯拉的辅助驾驶在国外一直扮演着一哥的角色,但这些技术在国内本土化上的进展却不尽如人意。
2019 年 5 月 NOA 在国内开展公测,在随后的两年,除了智能召唤功能发布外,特斯拉在辅助驾驶上再也没有太大的更新动作,更多的是功能上的小修小补。然而就在这两年的时间里上,国内以小鹏汽车为代表的造车新势力逐渐将这些差距追了回来,甚至在用户体验上有所超越。
小鹏 P7 和特斯拉 Model 3 就像是在游戏中不断打怪升级的两个玩家,这两个玩家虽然都能够单挑赢过最终 Boss(完成导航辅助驾驶),但他们的装备(硬件配置)和操作(软件能力)水平却不太一样。

小鹏 P7 所配备的装备可以说是当前量产车上属于非常豪华的了,它使用英伟达 Xavier(算力 30 TOPS)作为主控芯片,处理 14 个摄像头、5 个毫米波雷达(1 个长距离雷达 + 4 个短距离角雷达)和 12 个超声波雷达的数据,地图使用的是高德的高精度地图。
特斯拉 Model 3 所搭载的传感器相对来说就不那么豪华了,但它拥有一个命名为 FSD(算力 144 TOPS)的主控芯片来处理 8 个摄像头、1 个长距离毫米波雷达和 12 个超声波雷达的数据,地图使用的是国内的导航地图。
用一个通俗的比喻来评价这两款车:小鹏 P7 拥有千里眼和顺风耳,特斯拉虽然没有,但是有一个更加聪明的大脑。
特斯拉的 NOA VS 小鹏的 NGP
特斯拉 Model 3 和小鹏 P7 都能够根据导航实现辅助驾驶,但他们的策略有所不同。
NOA 实现导航辅助驾驶的逻辑是倾向于相信自己感知到的环境信息,这种驾驶策略更类人,泛化能力更强。但是如果出现光线差、道路上的车道线消失、新旧车道线交叠,道路岔口变多等复杂场景时,辅助驾驶系统便会请求驾驶员接管,体验上会差一些。
NGP 实现导航辅助驾驶的逻辑是倾向于相信高精度地图提供的道路结构进行驾驶,这种策略与大多数主流自动驾驶厂商类似,它的鲁棒性更强,不容易受到天气、光线的干扰。但如果道路结构发生变化而高精度地图未及时更新时,会出现走错路的情况,不过由于国内图商更新地图数据还比较及时,这类事情发生的概率相对较低。
Model 3 的 NOA 功能在体验上已经可圈可点了,但拥有高精度地图的小鹏 NGP 更像开了 「外挂」 一样,在体验上会比 Model 3 更加省心一些。
比如 NOA 每次在经过匝道上主路后都需要驾驶员手动调整车速,小鹏则是根据所在路段自适应限速,不需要驾驶员介入;再比如 NOA 由于使用的是导航地图,没有车道级的道路拓扑,因此在高架连接路段的 Y 型路口,比较容易出现走错路的情况,相比较之下,小鹏 NGP 对这些路况处理得就更加游刃有余,针对国内路况进行了更好的优化。比如下面这个对比测试视频。
特斯拉 NOA 出现的问题集中体现在国内路况本地化适配的问题上。
不同于小鹏 NGP,无论是训练数据选择还是驾驶逻辑的设计都是依据国内的路况,而特斯拉 NOA 整套系统的逻辑设计采用的还是美国的训练数据和路况为主,直接照搬这套驾驶逻辑是很容易出现水土不服的,这就是为什么特斯拉要组建中国本土技术团队的原因。
特斯拉智能召唤 VS 小鹏停车场记忆泊车 VPA
除了高速巡航场景外,泊车是辅助驾驶领域另一个十分重要的场景。
特斯拉在泊车领域的技术投入没有高速和城区大,因此在它的泊车和召唤功能并没有像 Autopilot 和 NOA 一样受欢迎,媒体和用户在社交媒体上的评测也相对较少。
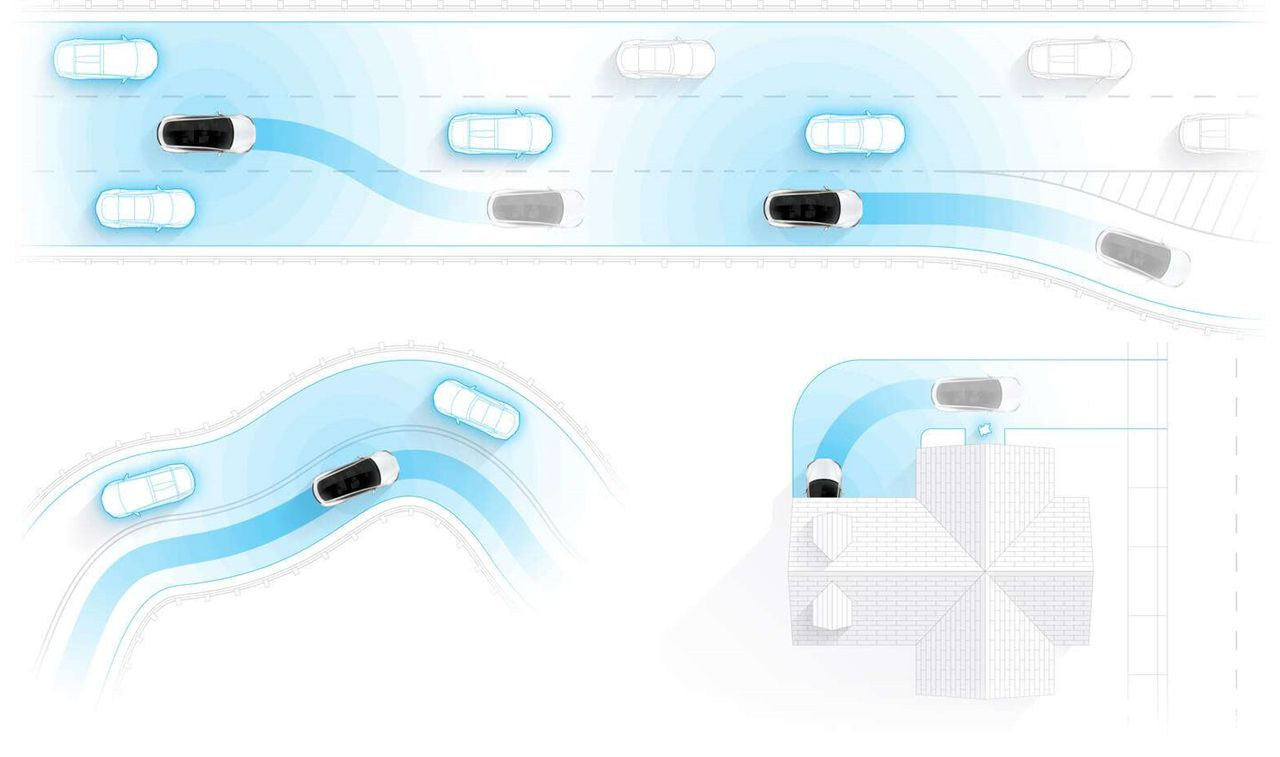
特斯拉的智能召唤更适合在有 GPS 覆盖的室外停车场,这样用户通过手机端发出的 GPS 信号,能给特斯拉一个大致的方位,然后特斯拉根据自车传感器上的感知周围的环境信息,并 「漫游」 到目的地,在此期间识别各种障碍物进行避障。
在室内停车场虽然也可以触发召唤功能,但由于车上的 GPS 天线被遮挡,特斯拉只知道目的地,却并不知道自己所处的位置,因此在进行 「漫游」 时很容易钻到死胡同里面,出不来,导致召唤失败,需要驾驶员处理。所以这项功能更像是一个新奇的玩具,用户在试用过后再次使用的频率相对较低。
相比之下小鹏 P7 更善于捕捉国内用户的泊车困境,解决泊车上的痛点。在近期 OTA 的 2.6.0 版本,推送了 VPA(Valet Parking Assist)停车场记忆泊车功能。

这项通能可以按照用户设定的路线,辅助驾驶员将车辆从设定路线的起点,开往设定路线的终点,自如应对停车场中出入库的车辆、对向来车、行人穿梭、连续直角弯等复杂场景,并泊入终点附近已被系统记忆的车位。
插入视频:XPilot 3.5 记忆泊车(小鹏是否有更好的素材可以提供?)
上个月小鹏 P7 通过 OTA 将系统更新至 Xmart OS 2.6.0,随之发布的停车场记忆泊车功能还是测试版本,需要驾驶员坐在驾驶位上进行监控。相信不久之后,用户就可以在设定路线的起点下车,通过手机完成整个泊车过程的监控,真正做到让车自己去找车位泊车了。
结语
现在我们回过头来聊聊题主所说的 「心态」 问题。
特斯拉作为汽车科技的引领者,能够更快地获得更高级别的自动驾驶功能;小鹏作为国内造车新势力的代表车企,虽然推出的功能比特斯拉稍晚,但是他们发布出来的产品都将用户体验打磨得很好,更加适合中国路况,而这正是特斯拉不足的地方。这样看来,消费者选择小鹏 P7 而不买 Model 3,就很容易理解了吧。

















