引言
根据视频的长度网上有三个不同的版本,分别是一分钟,三分钟和七分钟的版本,经过搜集,这里把时长最长、信息最丰富的版本奉上。如下:
智己汽车市区 40 分钟无接管智能驾
第一次看到视频中汽车的表现,我一度以为这是安装了激光雷达的车型,因为关键目标检测的位置精度很高,而且很好地处理了好几次 GPS 天线严重遮挡、道路新旧车道线交替以及社会车辆抢道博弈的场景。后来经过求证发现,这竟然是无激光的版本跑出来的效果,那确实值得好好分析一下了。
从视频中可以看到,本次自动驾驶的路况包括城区无保护左转、路口通行、上下高架、高速巡航、拥堵跟车等。基本囊括了我们日常开车的大部分场景。
下面我就从技术的角度评判一下视频中这辆自动驾驶汽车的能力。
无接管自动驾驶的技术端倪
硬件配置
首先来看看视频中这款车的硬件配置。
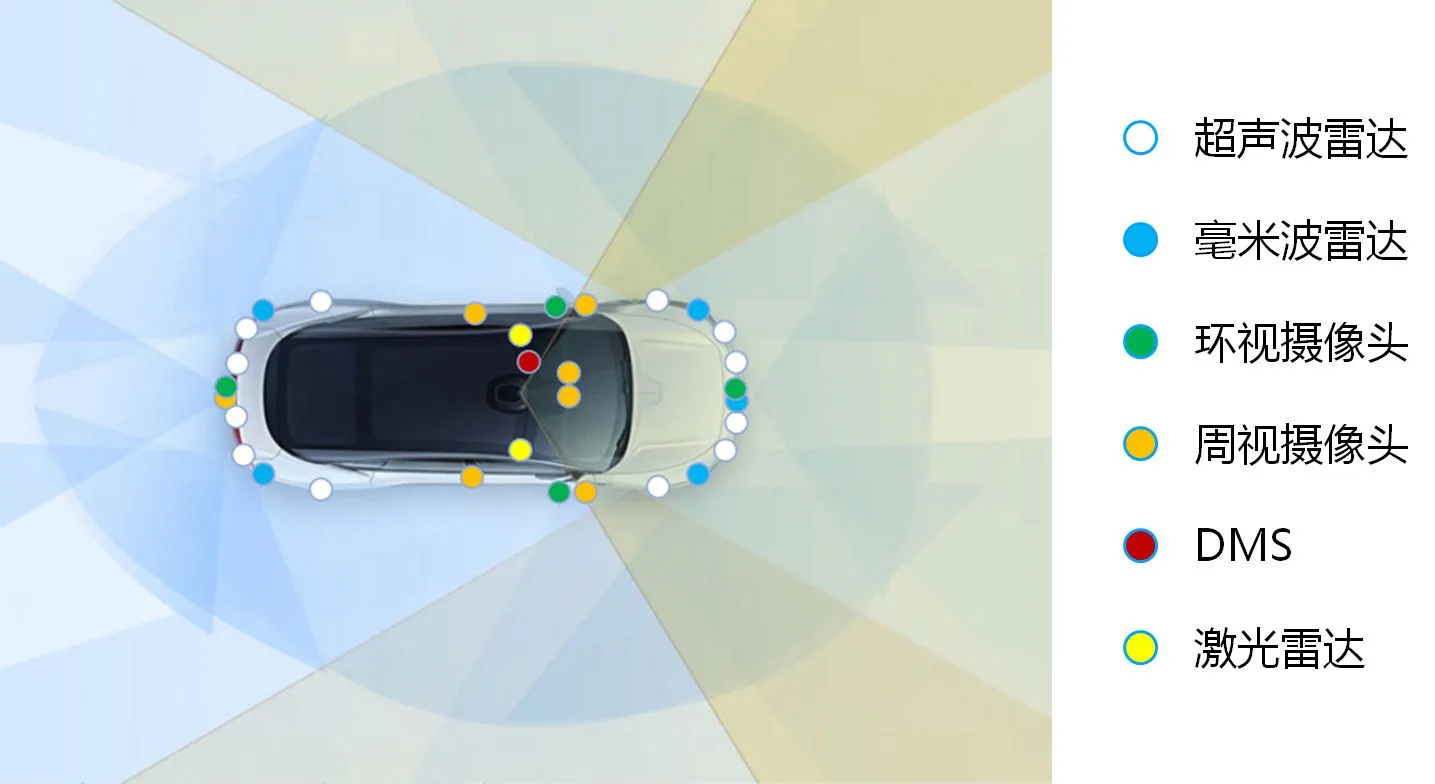
智己的这款自动驾驶汽车搭载了 12 个摄像头、5 个毫米波雷达、12 个超声波雷达。
值得一提的是,智己在传感器架构上,给激光雷达预留了位置,激光雷达可以选择以硬件升级的方式进行安装,这样就为那些中低配车型提供了硬件升级的可能性。除了激光雷达传感器的硬件升级之外,智己汽车还能进行计算平台的升级。主控芯片由 Nvidia Xavier (30 TOPS) 升级为 Nvidia Orin X(500+TOPS),以此来支撑更高级别的自动驾驶功能落地。
感知与规划控制能力
评估一个自动驾驶系统的好坏主要从两方面展开,即感知能力和规划控制能力。
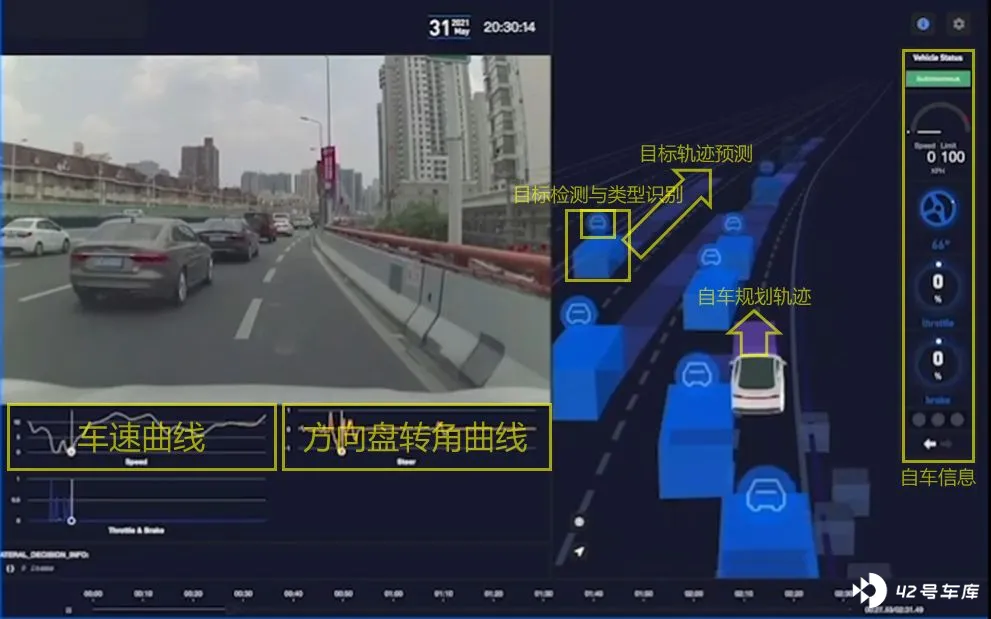
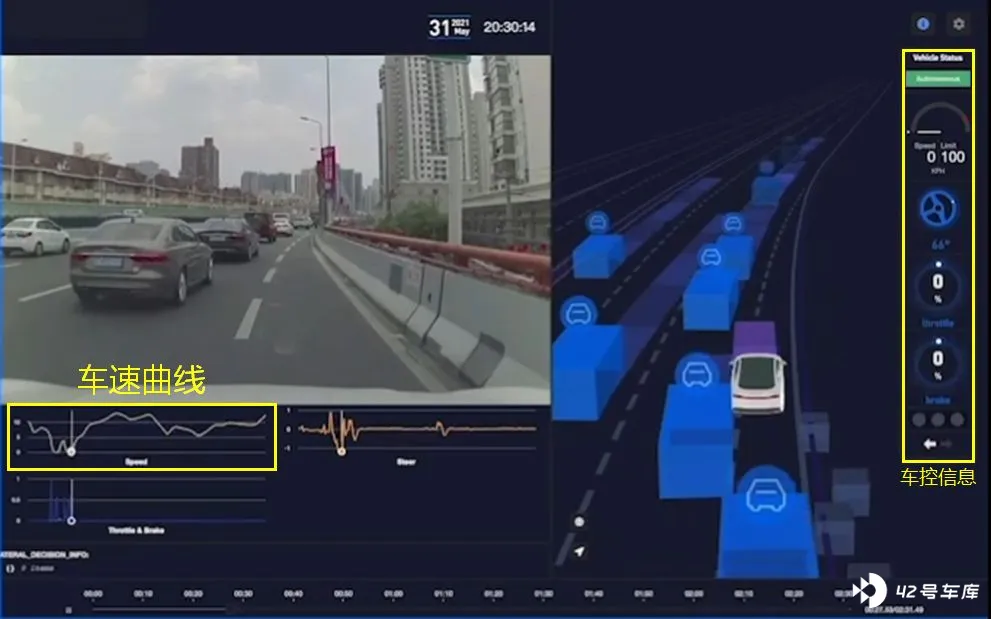
我们可以在视频的右上角看到自动驾驶系统的一些环境感知和控车信息。这些信息包括车速、方向盘转角、目标检测的结果和预测轨迹和自车的规划轨迹。
感知能力
感知是自动驾驶汽车对环境认知的一个统称。一般意义上感知分为对自车位置的感知和对周围环境的感知,对应到自动驾驶系统中的模块分别是定位和目标检测。
定位
定位是一个自动驾驶系统的最基本能力之一。所谓定位,就是自动驾驶汽车要知道自己在哪,这样才能正确地规划出到达目的地的全局轨迹。
视频中的汽车尚未配备激光雷达,因此定位模块只能通过 GPS/IMU、摄像头和毫米波雷达这些感知信息实现。不依赖激光雷达的定位模块大概流程是这样的:粗定位 -> 横向精确定位 -> 纵向精确定位。
首先通过 GPS 历史轨迹确定自车在高精地图上的大概位置,获取这一区域的高精地图信息,实现粗定位;然后根据摄像头的车道线检测、毫米波雷达的护栏检测能力确定自己与车道、车道线的相对位置关系,实现横向上的精确定位;最后通过视觉识别地面上的标志物(如箭头、数字等)与高精地图上对应的标志做匹配,即可实现纵向上的精确定位。
无激光的定位系统的难点有如下几点:
- GPS 天线被严重遮挡时
视频的 2 分 4 秒开始,可以看到自车位于多重高架中。这个区域 GPS 天线被严重遮挡,GPS 信号基本不可用,再加上即将进入分叉路和大曲率匝道中,对定位系统有些挑战,但自车表现稳定且未发生偏移和抖动。

- 现实变更之新旧车道线
视频的 4 分 58 秒,出现了路面的新旧车道线,此时感知系统一般会检出多条车道线,定位系统使用车道线进行横向定位时,可能会因为选错导致定位错误,进而发生横向的偏移。
视频中的自动驾驶汽车在行驶过该路段时,未出现横向晃动,表明系统具备一定的高精地图与现实不匹配时稳定处理的能力。

整体来看,这套不依赖激光雷达的定位系统无论是在高架上还是在城区,其表现都比较稳定,系统整体的鲁棒性比较高。拥有一套稳定可靠的定位系统是自动驾驶最为基本,也最重要的能力之一。
目标检测
从视频中可以看到,自动驾驶汽车在经过城区和高架环路的过程中出现了汽车、公交车、骑行人、三轮车、行人以及静止的电瓶车等。这些属于城区路况中常见的交通参与者。据说,除了以上在视频中展示的目标检测外,它还能识别推车、助力车锥桶 、水马桶等,期待智己能够放出更多相关视频。
除了检测的种类丰富外,目标检测的精度也很重要。从 4 分 31 秒视频右上角可以看到,在拥堵场景下,他车从自车左后方超车的过程中,他车的横向位置十分稳定。
在低速近距离的情况下,只有安装在汽车 4 个角上的毫米波雷达能够探测到旁车的位置,但此时雷达的信噪比不高,很容易出现检测结果的晃动(如下所示),需要比较优秀的跟踪算法才能做出本次视频中的效果。

规划控制能力
从视频中的车速栏可以看出整个自动驾驶过程纵向(车辆前进方向)的控制较为平稳,很少出现急刹车。除了在 4 分 26 秒的主动汇入拥堵车流段外,无论是拥堵跟车,还是前车 CUTIN,司机基本没有出现身体前倾的情况,可见整体重刹的次数很少,控车的舒适度应该还不错。
横向控制上,具备超车换道、导航变道等基本换道功能。除此之外,横向控制上值得一提的是视频 3 分 12 秒开始的汇入博弈,如下。

自车在一个汇入口和他车进行抢道博弈,自车在向右换道过程中发现他车已经占据了车道的一部分导致自车换道无法完成,因此进入一个 Hold 在目标车道的逻辑,等待他车的动作,在与他车并行 2 秒后,他车并没有退出车道的意图后,将 Hold 逻辑变换为回到原车道的逻辑,整个博弈过程比较流畅,决策也很像人类,这对感知、预测和规控三方的配合有着不小的挑战,工程师应该花了不少心思来调校这块的逻辑。
这个场景让我想到了之前媒体发布的极狐城区自动驾驶视频,这辆车搭载的是华为的自动驾驶系统。它需要处理的也是一个复杂的博弈场景,博弈的对象是对向的汽车和路旁的电瓶车。
虽然低速场景下的自动驾驶给司机的压迫感没有高速场景大,司机没有太大的接管冲动。但能在这种人车混行的复杂场景下顺利通行,充分说明博弈逻辑在自动驾驶中的重要性。
从整体来看,智己这次公布的 40 分钟无接管视频确实展示了他们不错的感知和规控能力,而且在实际道路中的表现也是可圈可点的。
结语
智己汽车在无激光雷达情况下,在上海高速环路和城区路况下的无接管表现已经做到足够出色。虽然在城区场景下路边的行人和部分骑行人的检出位置有抖动,但这些非关键目标并不会对自车产生影响。相信后续在加入激光雷达后,智己这套自动驾驶系统的感知的能力和精度会提升很多,能够处理更为复杂的天气和路况。
国内自动驾驶的大爆发就在 2022 年年初,到时候会有很多搭载城区自动驾驶功能的重磅车型发布,会有很多选择高配车型的用户优先体验到全场景(城区、高速、停车场)的自动驾驶功能。