这三家公司,虽然都同处自动驾驶行业,但走了三条完全不同的商业化路线,这样的商业化道路的选择也间接决定了他们的技术路线。下面就展开聊下这三家的比较独特的地方。
小马智行
小马智行的联合创始人有两位,首席执行官彭军和首席技术官楼天城,这两位大佬都曾任职百度自动驾驶部门。彭军曾层担任了百度自动驾驶部门的首席架构师,负责百度自动驾驶的整体战略规划与技术发展,百度 Apollo 的雏形就是在彭军的领导下搭建起来的;楼天城是百度历史上最年轻的 T10 工程师,在百度主要做技术研发。

百度自动驾驶部门当初是跟随 Waymo,技术研发重心主要放在了 Robotaxi 上的,因此小马智行成立后继承了百度的衣钵,选择了自动驾驶领域商业化前景最大也是最难的领域 —— 无人驾驶出租车 Robotaxi。
小马智行在 2016 年年底成立,经过了半年时间就搭建起自己的原型车。经过持续的硬件迭代和研发创新,在 2020 年第四季度推出了第五代自动驾驶硬件方案 PonyAlpha X。这套硬件的标准化程度很高,一体化的硬件设计不仅能够减少总成的重量还能提高对对振动、温度、湿度、电磁等抗干扰能力。依托这套一体化的硬件以及强大的软件实力,小马智行在广州南沙率先试点城区公开道路 Robotaxi 常态化运营,成为首个在中国市场提供 Robotaxi 服务的公司。

今年年中,我就专门去了一趟南沙调研小马智行的 Robotaxi 技术,运营的路况以城市主干道和城中村辅道为主,路上很多不守交通规则的电瓶车、三轮车横穿,这些交通参与者对自动驾驶的感知和规控能力都提出了很高的要求。从实际体验来看,小马智行的 Robotaxi 在南沙的通勤速度中规中矩,虽然速度不快但表现很稳,坐在车上给人的感觉很放心。
小马智行 Robotaxi 的技术迭代很简单。先用零星的几辆车在某个城市进行测试,将这个城市可能发生的问题先解决一轮,当问题解决到一定程度,在风险可控的情况下,让更多的测试车加入进来,更大规模地测试,发现并解决问题。因为现阶段测试车上都配有安全员,所以安全可以得以保障,研发人员只要每天处理安全员接管或人工上报的问题即可。一旦运营足够长的时间,且不再发生新的问题时,就可以面向公众运营了。
总结而言就是跟随着老大哥 Waymo 走,在近期又迫于商业化压力开始切入 Robotruck 这样比较容易落地的赛道。
国内大部分 Robotaxi 领域的玩家,基本都是这个思路。Momenta 有些特别,他们走了另一条路。
Momenta
Momenta 的创始人曹旭东,先后任职于微软亚洲研究院和商汤科技,曹旭东的搭档或多或少都有微软或商汤的背景。得益于商汤科技这种以 AI 技术为导向公司的熏陶,Momenta 内部对数据驱动自动驾驶成熟的执念很深,因此投入了巨大的资源用于布局数据驱动的无人驾驶解决方案。

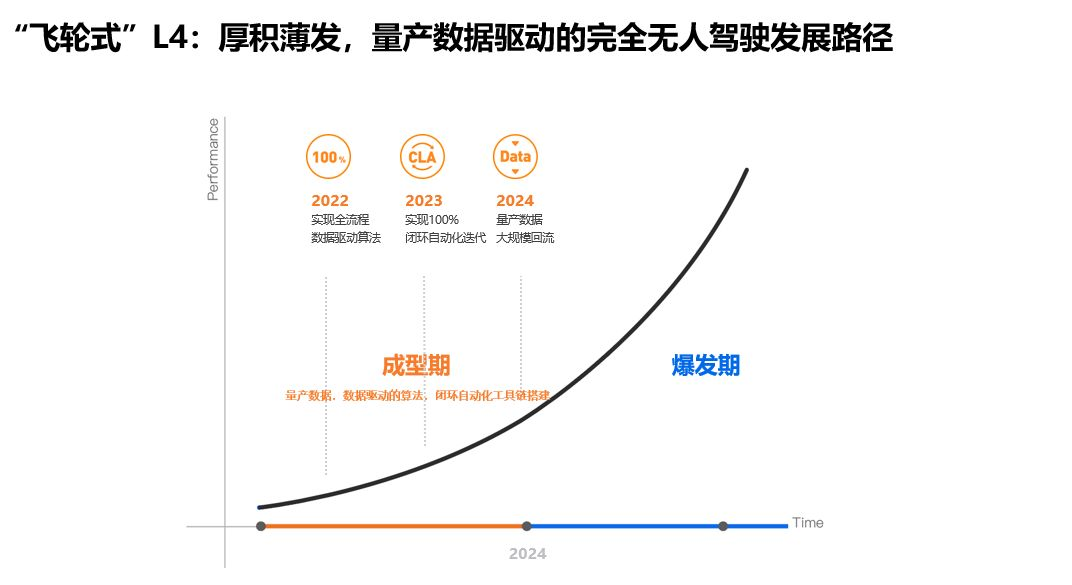
自动驾驶是一个需要不断解决长尾问题的系统,因此必须具备不断迭代的机制来驱动系统的完善。数据、算法、算力的铁三角组合能够保证自动驾驶数据的闭环,用数据来驱动算法的迭代,时间越长,积累的数据越多,算法能力也越强,实现良性循环。Momenta 工程师的很大一部分精力都投在这套 「飞轮式」 L4:量产数据驱动的完全无人驾驶方案上。
虽然 Momenta 意识到了数据很重要,但他们做 Robotaxi 的规模相比于小马智行却小很多。为什么呢?最根本的一点是 Robotaxi 的大规模运营太烧钱。Momenta 觉得小马智行那套通过烧钱来获取数据迭代软件的方式并不合算,但目前纯靠摄像头又没法实现 L4,推出大批量装激光雷达的 Robotaxi 车队太打脸了。
于是他们与众多整车厂合作,为整车厂提供自动驾驶服务。这样一来,整车厂发售车型的竞争力得到提高,Momenta 也能依托全国各地的量产车获得他们所需要的数据。到 2024 年,量产数据大规模回流时,就是 Momenta 自动驾驶技术成熟的关键节点。
从 Momenta 的布局可以看出,他们最终的商业模式还是 Robotaxi,只不过他们为了能更高效且低成本的拿到迭代无人驾驶系统所需的数据,选择了跟整车厂合作这一条路。
除了 Robotaxi 和跟车厂合作外,还有哪种被投资圈认可的商业化道路呢?那就是以轻舟智航为代表的从 Robobus 切入 Robotaxi 赛道。
轻舟智航
轻舟智航的创始人于骞曾是谷歌街景组关键项目的 Tech Lead,而谷歌街景脱胎出了 Waymo 前身 Google X 实验室。后来于骞在 Waymo 担任的是感知关键模块的 Tech Lead,对谷歌无人车的研发和管理都比较熟悉。其他三个创始人侯聪、大方、汪堃分别是架构性能、规控、仿真的大牛,之前都在 Waymo。

坦白来讲,轻舟智航入局的时间很晚。作为一个后来者,比不上小马智行钱多,也比不上 Momenta 人多。
他们破局主要是在落地和技术路径上独辟蹊径,目前国内网约车平台的打车体验已经足够好了,短期内 Robotaxi 的体验和性价比又很难做到超过这些打车平台,因此 Robotaxi 在目前看来不是一条好赛道。再加上近几年共享出行的发展让国内营运车辆大幅增加,加剧了大城市主干道的拥堵,针对城市毛细血管(支干道)提供多人出行服务的微循环公交越来越受到城市管理者的欢迎。此外 Waymo 在 Robotaxi 领域摸爬滚打这么多年的经历,让轻舟智航清晰地认识到 Robotaxi 大规模商业化的技术难度,因此他们选择了更加容易落地,且商业化前景更为清晰的 Robobus。
从技术的角度来看,Robobus 实际上就是当前技术现状下的 Robotaxi,因为各家的 Robotaxi 都是点到点的固定路线,只不过有些公司的停靠点数量更多而已。因此在设计之初,可以完全按照 Robotaxi 的技术架构来进行设计,这也就意味着随着 Robobus 路线的增多,是很容易转换到 Robotaxi 领域的。在 Robotaxi 短期还没法大规模落地的当下,在固定路线上拿到了匹配的客户和用户群体,让自动驾驶实现更快地落地,有那么一点降维打击的意思。

除了商业模式的区别外,在实现完全无人驾驶的技术路线上,轻舟智航也有一些独特的理解,也就是 「自动驾驶超级工厂」 战略。
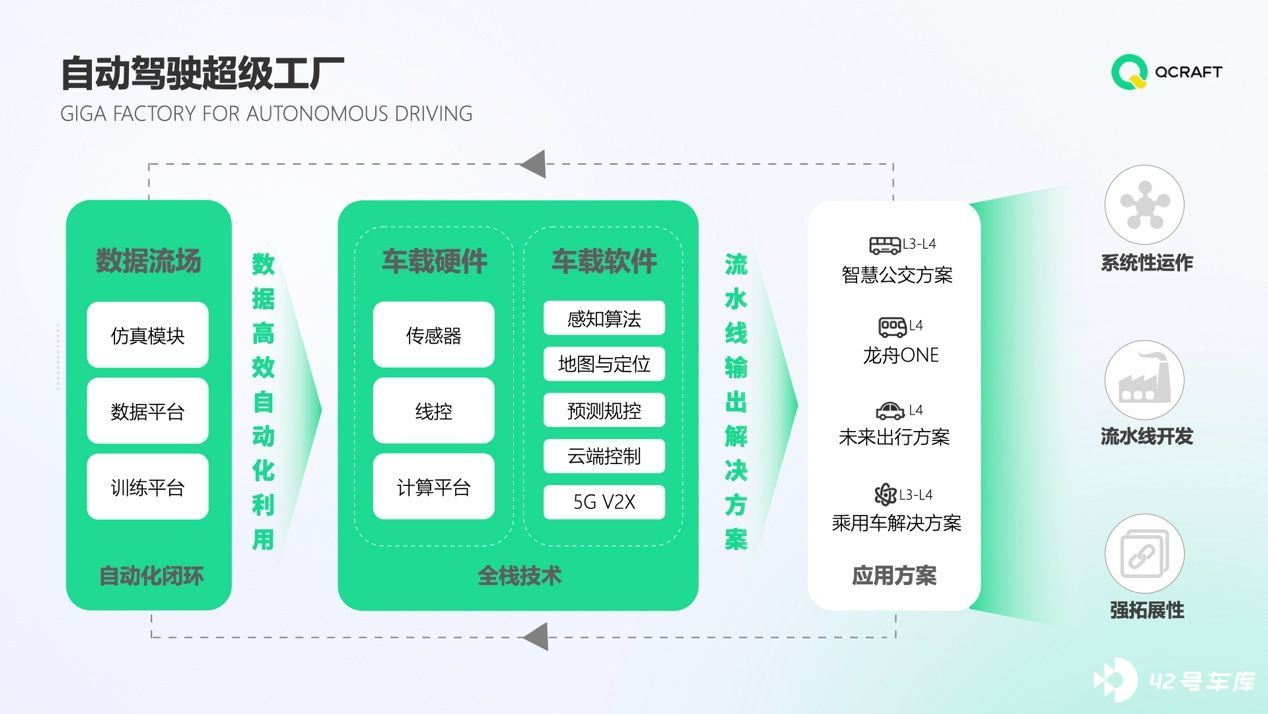
他们认为,因为服务于整车厂的传感器种类和计算平台都是 L2、L3 的应用场景,这与 L4 的 Robotaxi 所需要的数据差异很大。受成本影响,很多 L2、L3 方案的乘用车主要以视觉和毫米波感知为主,个别有激光雷达辅助,方案的计算能力和数据维度相对较低。这样的配置,是很难和 L4 的数据很难形成互通。在构建数据闭环上,有很大的挑战。
基于这样的认识,轻舟智航通过一套硬件方案适配多款车型,保证落地项目能快速高效地进行部署、不同车型之间的数据能够共用。而且巴士这类商用车的成本没那么刚性,即使部署 L2、L3,方案上做到冗余可靠,配合驾驶员监控及培训,安全能大大提高一个数量级。
除了硬件上的考量外,轻舟智航在软件设计上还有一个独特的地方。一般的自动驾驶公司都是先着手于地图、定位、感知、规控这些模块的研发,在进行大量的路测后会发现交通场景变化万千,单靠路测是很难将问题发现完全的,这才意识到仿真工具的重要性,于是回过头来搭建仿真环境。
轻舟智航是国内最早提出的,从一开始就将仿真作为核心能力来搭建技术栈的创业公司。但当时这个理念太新,国内大部分人都无法理解,甚至有些人以为轻舟智航是一家卖仿真软件的公司,从目前行业的共识来看,轻舟智航在当时是非常有前瞻性的。
除了数据积累,轻舟还一直在强调自动化,包括把非监督学习应用在在融合感知方向,减少人工标注的依赖;在应用中注重传统机器人学技术和机器学习技术结合,既增强了人工智能技术的可解释性,又能够减少工程师反复手动调参的操作,把工程师时间转化为机器时间。
回到商业角度看,这套工具链如果后续还能作为产品提供给主机厂,应该能解决当前乘用车激光雷达上车的燃眉之急。
总结
有的公司财力雄厚,可以铺开路测,靠大规模的路测收集第一手的数据,来发现问题;有的公司通过和整车厂合作,依托全国的量产车来收集数据;有的公司从最开始就将仿真作为自身的核心技术,从细分场景切入,借助仿真及相关工具链,能形成高效的数据测试闭环。
从小马智行、Momenta 和轻舟智航等国内这些自动驾驶创业公司的商业模式和技术路线可以看出,数据积累和使用已经是行业内的共识了,如何更低成本地获得有效数据,并且自动化使用,已经成为各大公司角逐市场的关键。