出行百人会旗下媒体,关注汽车出行产业链进化
作者:郑文 周长贤
认识你自己,凡事勿过度。这是希腊德尔斐神庙阿波罗神殿门前的三句石刻铭文的前两条。
这两句古老的箴言,对于人们的世俗生活有警醒作用,对于当下百年未有之大变局的汽车行业也是如此。
然而,在急剧变革的汽车行业中,随着新产品、新技术、新商业模式的层出不穷,暴露出的矛盾与问题也越来越多,有人随波逐流,有人剑走偏锋,行业在混沌与争议中前行。
近日,在盖世汽车首届智能汽车域控制器峰会上,各大主机厂、供应商阐释了各自对域控制器、算力与软件定义汽车概念等热点问题的理解与应对,在交流与碰撞中,一些行业共识逐渐呈现出来。
《出行百人会 / AutocarMax》试图在论坛的高密度信息中,梳理出几点趋势性变化,以及业内对某些共同话题的思考。
电子电器架构的困境与重塑
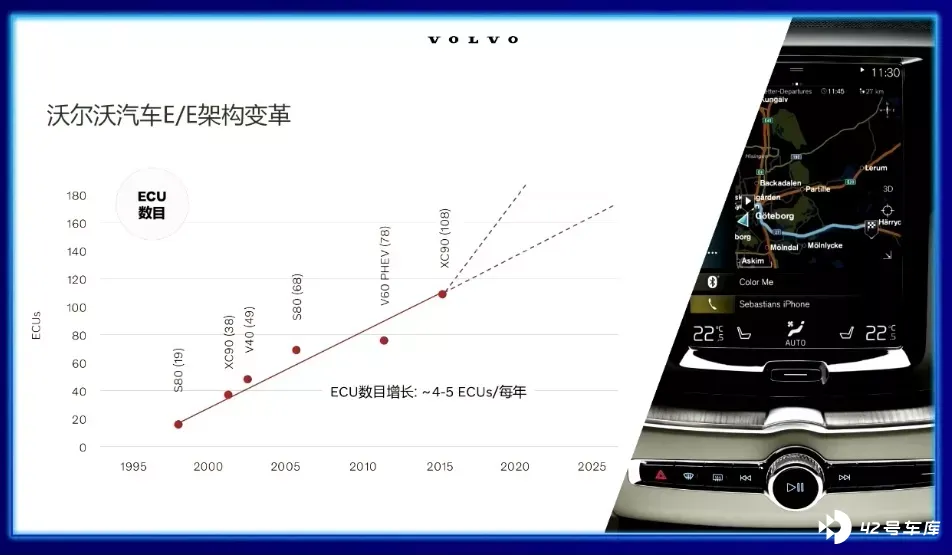
最近 30 年,汽车的 ECU(Electronic Control Unit,电子控制器单元)数量快速增长,从几个变为几十个甚至上百个。以沃尔沃汽车为例 ,1995 年之后,其 ECU 数量以每年约 4~5 个的速度增长。
由此延伸出来的现象是,汽车软件的代码从几十万行增长到以亿为单位,其复杂程度早已经超过一般电脑。博世曾经预测:搭载 L2 级别的自动驾驶汽车代码大约在 1 亿行;L3 将到 2 亿~3 亿行;而 L5 自动驾驶时,代码直接来到 10 亿行。
作为一名软件工程师,当你写几百行的程序时也许并不难,但随着代码的数量级扩展到几亿行之后,整个系统的维护就变得极其困难,甚至充满风险。
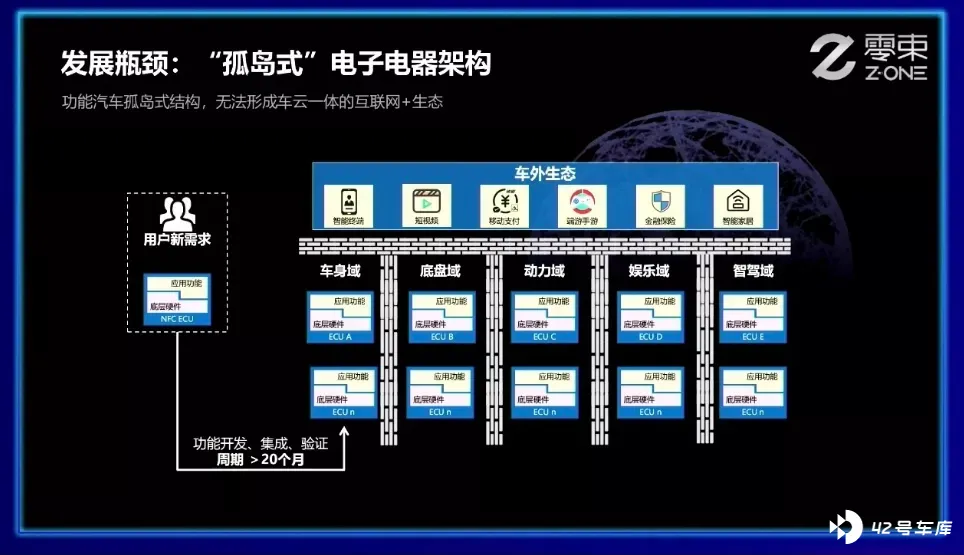
从另一个维度看,现有电子电器架构的困境则更为清晰。
「从线束的角度来出发,整车的线束越来越复杂,我们大概测算了一下目前一辆车里面,把所有的线束连接在一起会有几千米长。」英飞凌汽车电子事业部电子电气架构负责人韩颖说,「这些线束有很多复杂的布局,空间也越来越狭小,需要人工手动布置,同时自动化生产也没有办法提高效率,种种原因就使得电子电器架构的变化势在必行。」
如果把现有架构的系统复杂性更具象化地列举出来,那就是:
-
网络结构复杂,容易形成信息和数据的孤岛,网关,域控制器是瓶颈。
-
为了实现功能迭代,持续增加 ECU,导致 ECU 数目众多,算力浪费,无法形成协同。
-
大多数情况由不同供应商开发,框架,软件无法协同复用,很难统一 OTA。
-
大多数情况下,一个用户功能分布在多个不同的 ECU,往往变更 / 升级一个功能需要协同多个 ECU / 供应商,甚至有时还会出现总线信息不支持的情况,慢,成本高。
-
ECU 基本都是黑盒,外部开发者无法对 ECU 进行编程,无法由软件定义新的功能。
-
无法进行硬件升级。
应对上述问题,唯一的办法就是 —— 洗牌,重新定一个底层逻辑更合理的系统。也就是说,抛弃传统以大量重复性工程实现的方式,进化到以创新和迭代发展为主。到此时,传统的分布式电子电器架构已经达到了系统增长极限,于是域集中电子电器架构应运而生。
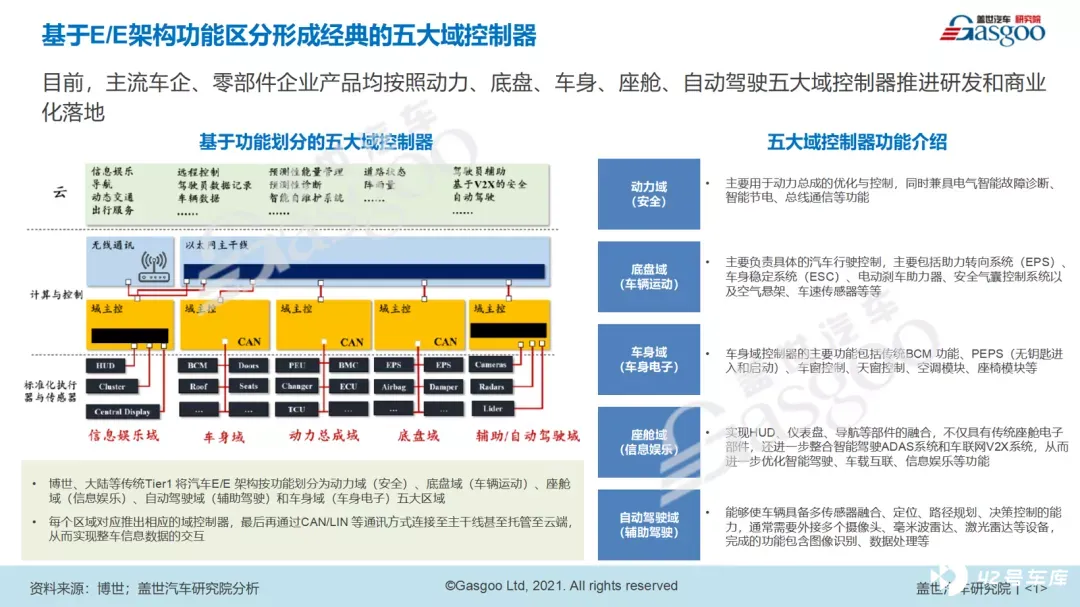
以自动驾驶域控制器为例,所有自动驾驶相关的传感器都集中在这个控制器上,有比较完整的异构计算能力(可以简单粗暴地理解为,让不同架构处理器协同作战),软件架构能够在一个相对稳定的硬件体系下得以不断完善。而其他的通用域控制器,则是能够提供相对传统 MCU(Micro Controller Unit,微控制器) 更加强大的处理能力,支持大规模的软件部署。
最终,不管是自动驾驶域控制器,还是通用域控制器,这些应用软件能够在不断的迭代发展中,拉动硬件在一个相对稳定的框架下不断升级。
根据盖世汽车研究院的数据,目前我国域控制器的出货量在 60 万左右,预计到 2025 年自动驾驶域控制器出货量将超过 400 万台套,而智能座舱域控制器出货量能够超过 500 万,复合增长率差不多在 50% 以上。
以自动驾驶域控制器为例,从竞争格局来看分为四类,第一类是传统外资 Tier 1,第二阵营是本土 Tier 1,第三阵营是互联网科技与软件公司,第四阵营是整车企业。
第一阵营的优势是整车架构和底盘技术积累丰富,核心技术领先。劣势是业务条线复杂,本土化场景开发缓慢,灵活性不足。
第二阵营的优势是更加契合国内交通场景应用需求,提供灵活性的定制化客户开发。劣势是核心软件、算法优势存在瓶颈,严重依赖海外企业。
第三阵营的优势是 AI、大数据算法等技术能力突出。劣势是平台需要跨车型整合,系统平台需突破互通性。
概括而言,传统外资 Tier 1 与本土 Tier 1 有两种配套策略,前者更倾向于自己跟芯片、中间件、零部件公司去做整合,做一揽子域控制器解决方案,后者则更多是偏向于集成化和协同分工的模式,当然国内也有很多企业开始不断地拓展边界。
值得注意的是,以宝马、丰田为代表的主流车企也开始自研基于域控制器技术的全新电子电器架构。

算力会无限膨胀吗?
如前文所述,在未来很长一段时间里,域控制器都将会是驱动智能汽车软件和硬件融合非常核心的部件,它分为应用算法、中间件、系统软件、芯片和硬件平台。
相较于传统 ECU,智能汽车上的计算平台的器件数、PIN / 布线 / 焊点数、整机功耗、EMC(电磁干扰)强度均是前者的 10 倍以上,单板面积是 6 倍以上,PCB 板层数是 4 倍以上。
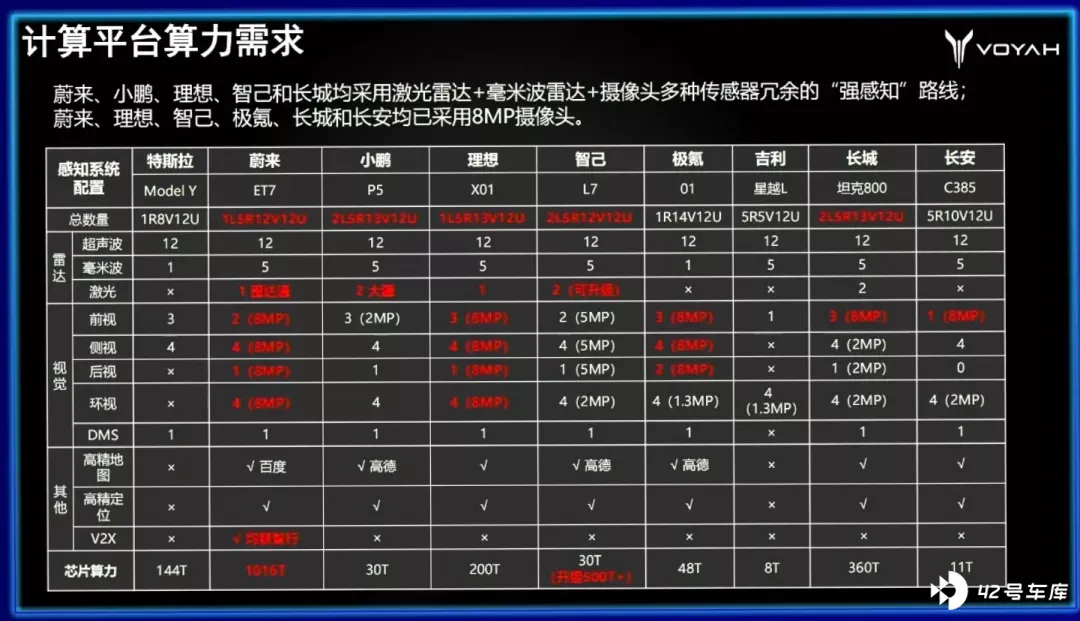
岚图汽车科技有限公司自动驾驶算法研发总监刘会凯认为,计算平台对算力的需求很大程度上取决于感知系统的巨大升级,包括激光雷达、800 万像素摄像头的搭载,另外复杂系统或者 SOA 架构的实施也对计算平台提出了更高算力需求。
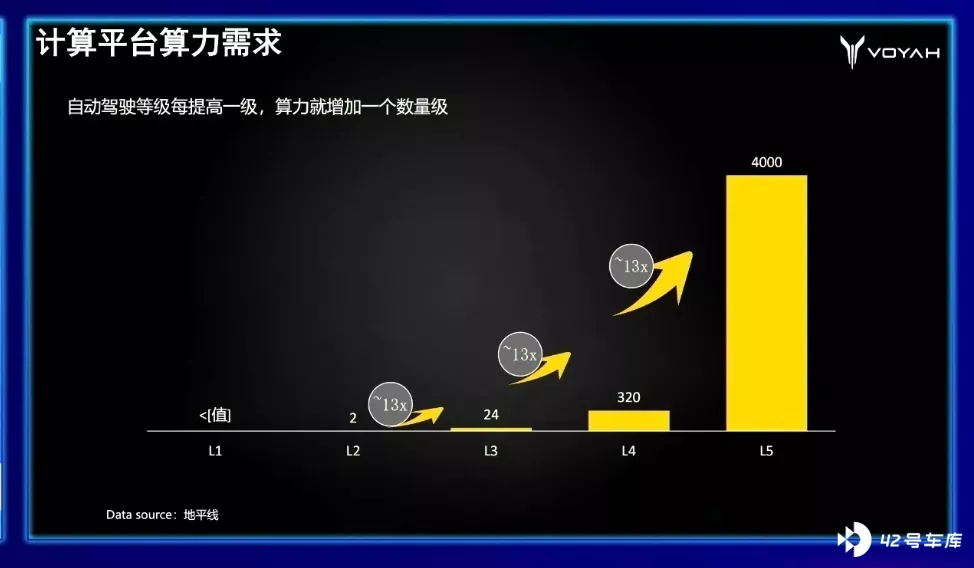
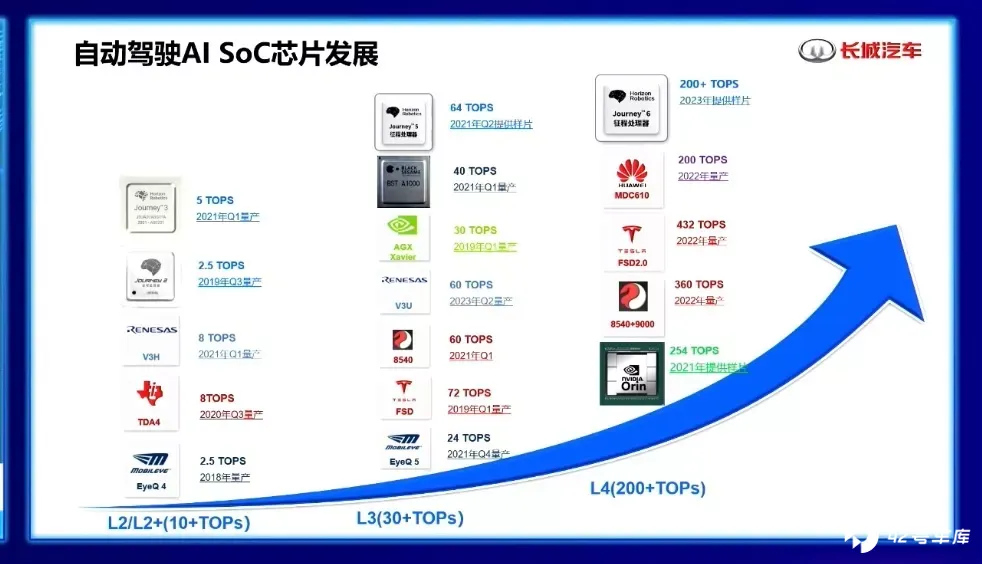
「自动驾驶等级每提高一级,对于算力就增加一个数量级,一般认为,L2 需要的算力 < 10tops,L3 是 30-40tops,L4 是 100tops 以上,目前对于 L5 所需的算力行业还没有明确定义。」 刘会凯指出,目前计算平台的算力只能支持部分 L3、L4 开发的需求。
华为智能汽车解决方案 BU MDC 解决方案部部长毕舒展则认为,面向 L2~L5 的计算平台,相对于传统的 ECU,在硬件、软件工程领域实现了 10~100 倍级别的挑战。
「比如,芯片算力 200TOPS 到 400TOPS 的时候,功率从 100 到 300 瓦左右,这么大的散热以前没有遇到过,还有液冷防凝露、EMC 复杂环境等工程问题面临巨大挑战。」
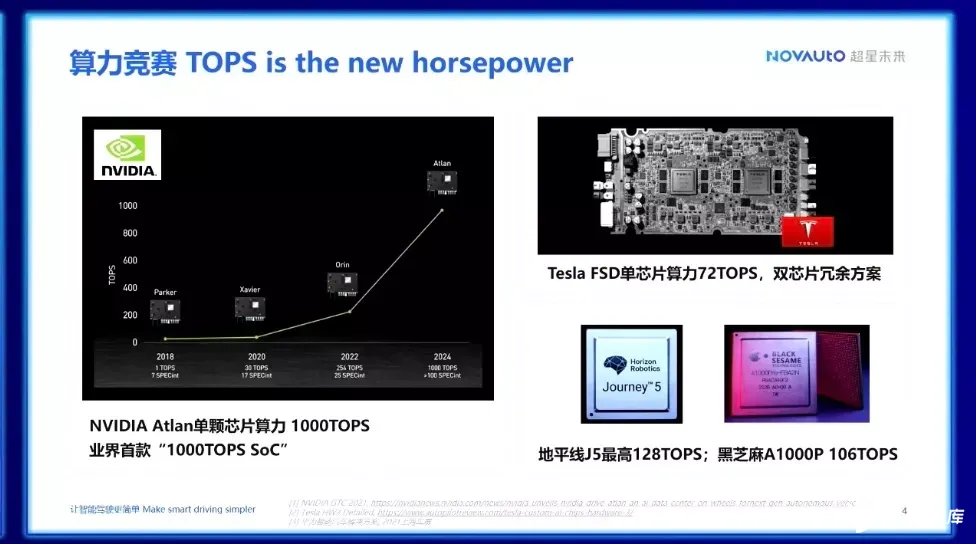
超星未来联合创始人兼首席技术官梁爽坦言,现在算力的军备竞赛已经掀起来了,「举例来说,今年英伟达发布业内首款 1000TOPS 的 SoC(System on Chip,系统级芯片),这相比特斯拉 FSD 单芯片算力 72TOPS 算力提升超过一个数量级。」
此外,他还注意到,国内有超过国外玩家的趋势,比如地平线 J5 最高 128TOPS,黑芝麻 A1000Pro 有 106TOPS,上个月刚刚宣布完成流片。
没有人能否认,算力对于集中式计算平台的重要性,但算力越大越好吗?一味地增加芯片算力是否真的符合用户思维?解决智能驾驶系统计算平台的支撑,是否只能通过芯片堆叠来实现?
刘会凯认为,智能汽车同样必须是以用户为导向的,但是纵观行业发展,有一些走偏的现象。比如说,传感器和芯片的军备竞赛愈演愈烈;硬件预埋,实施软件收入商业模式,但是超前和过度宣传 OTA,对此,国家已经开始加强监管。
「出于占领技术制高点、资本市场融资以及传播吸引力等方面的考量,在技术搭载和量产上某些企业比较激进,这对于用户来说不太负责任。」 刘会凯直言。
面对他抛出的一系列问题,业内人士似乎已有共识。
「算力也不能说无限地增长,芯片 PPA(功耗、成本和面积)都是很要命的。我们以前做芯片的时候很讲究功耗,有些车厂说现在是新能源,你不用担心电的问题,但是我们马上就告诉他,你不用担心电的问题,但是你要担心散热。」 湖北芯擎科技有限公司产品规划管理部总经理蒋汉平表示。
「所以我们不认为算力无限的膨胀和预埋是未来的趋势,特别是在 SoC 上,我们需要精准高效的算力来适配电子电器架构的变革。」
从智能座舱来说,车载芯片 CPU 的整体趋势,起步就是 60K DMIPS(算力),未来五年市场上主流的智能座舱都是在 60K DMIPS 之上,传统的基于以前的座舱慢慢演进过来的曲线可能还停留在 30K DMIPS 范围内,这种情况下是很难适配算力集中趋势的。车身电子需要 10 DMIPS,底盘 15K DMIPS,半自动驾驶 350K DMIPS,智能网联是 20K DMIPS。
梁爽坦承,芯片的算力本质上对于智能驾驶系统还是必要不充分的条件。
虽然大家都知道实现更好的系统需要更多的算力,但是现在大家更多提的算力是峰值算力。我们经常会看到一个优化程度不好的芯片宣称有 10TOPS 算力,实际跑出来的应用等效只有 3-4TOPS 的算力。因此,他认为,「计算平台设计不单单是算力问题,而是一个非常复杂的需要进行系统优化设计的问题。」
长城汽车智能驾驶架构总监董作民总结了大算力计算平台主要面临的四个维度挑战,分别是功耗、散热、电磁兼容和质量挑战。

梁爽指出,以 L2 + 域控为例,它的功耗需要控制在 30-40 瓦范畴之内,即便上水冷把功耗放到大几百瓦、上千瓦,对于电池作为动力能量源的车辆来说,对续航影响也是非常明显的。
「做计算平台本质上是硬件和功耗等资源受限条件下优化的问题,有点像带着镣铐跳舞的状态。」 梁爽表示,「我们面临着越来越复杂的系统,还需应对越来越复杂且快速迭代的传感器,手头有的其实是受限的资源,如何让计算平台方便部署、高能效以及安全可靠非常重要。」
软件定义汽车带来的挑战
如今,SDV(软件定义汽车)虽然仍有争议,但几成共识。那么,它给车企和用户带来的价值又是什么呢?
岚图汽车自动驾驶算法研发总监刘会凯认为,SDV 带给车企的价值是,可以通过软件升级和功能开放,带来产品价值的提升。通过对安全、舒适、动力、娱乐等子模块组合和搭配,形成不同的应用场景,原先封锁在自己域内的功能能够跟其他域灵活地串起来,最终实现千车千面的用户体验。
东软睿驰汽车技术(上海)有限公司总经理曹斌指出,SDV 加速发展的几个关键要素是:
- 出现比较通用化的计算硬件平台:自动驾驶和中央计算尤其关键
- 基于通用化的计算硬件,形成比较清晰的软件架构层次
- 车企的软件开发聚焦于应用软件,软件服务企业的分工逐渐细化
在上述技术发展的过程中,有一个关键点就是 「标准化」。
我们都知道,共享充电宝一般会提供安卓、苹果和 Type C 三种充电接口,如果接口对不上手机型号就无法充电。而在软、硬件工程开发中,接口同样都需要匹配,此时如果不标准化接口的话,仅仅匹配接口就会耗费大量精力。
在软件部分,随着中间件和开发工具的成熟,这部分将逐渐变薄,并标准化。正是这种标准化,保证了车企开发的应用可以不断迭代发展,而不会受到工程适配的拖累。
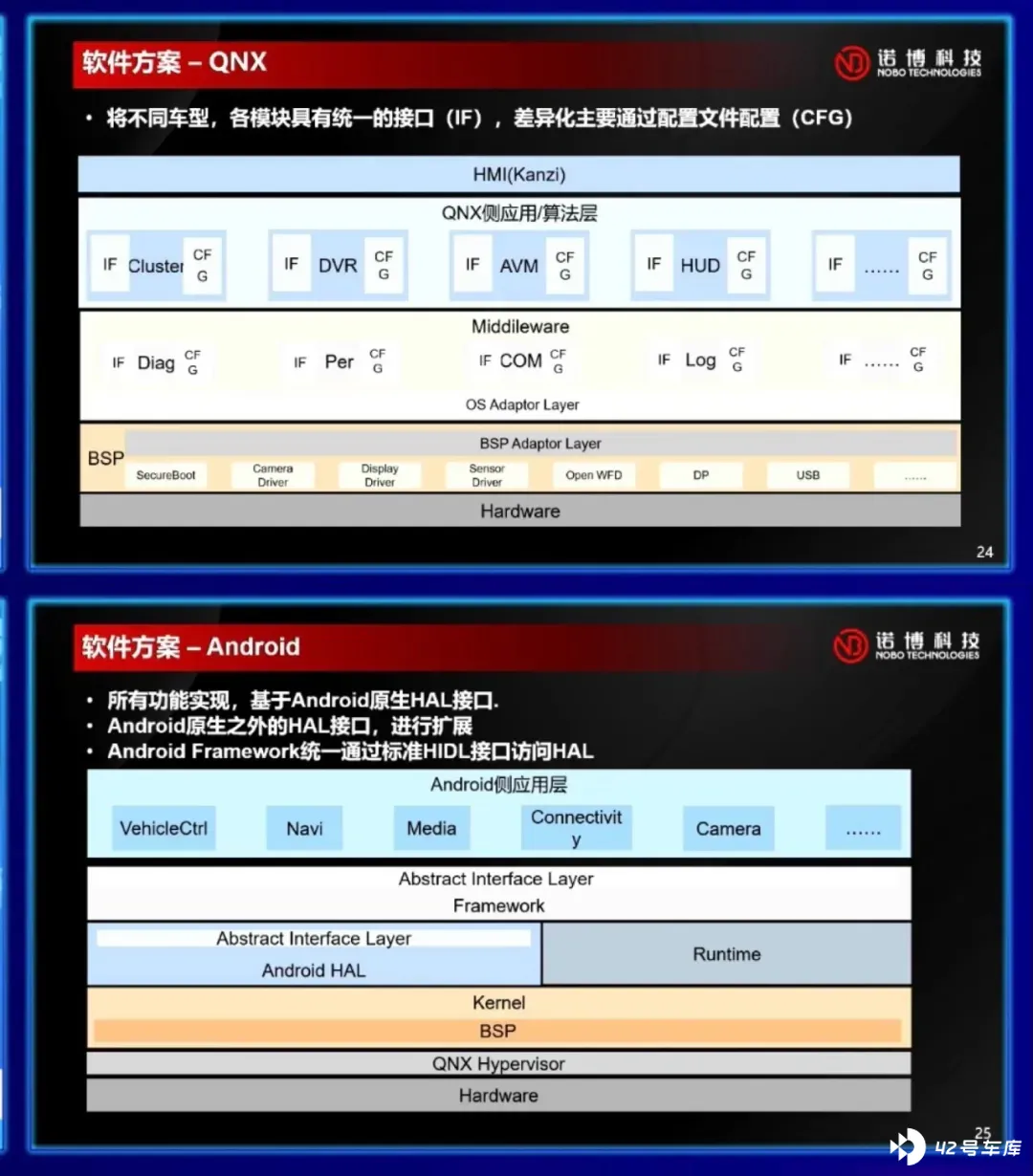
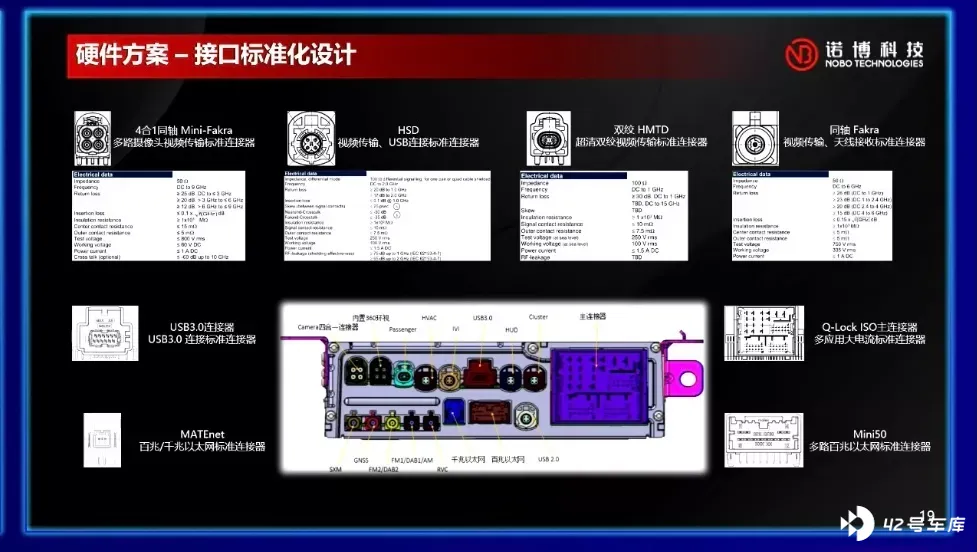
在这方面一些供应商已经有不错的解决方案。比如,据诺博汽车科技有限公司研发副总经理李哲哲介绍,在软件层面,诺博的产品将软件架构平台设计为最大化的可配置程度,以达到最少量代码的改动适配更多车企需求的目的。
此外,还有面向硬件的工程化适配,由于芯片还在不断发展,异构芯片形态会长期存在。因此,这部分反而会越来越复杂,工作量越来越大,对稳定性和性能的挑战也越来越大。
除了标准性,还有一些其他重要因素需要考虑。
比如,一个座舱域控制器需要适配一二十款不同车型,而这些车型需求不同。「那么如何构建一套域控制器平台覆盖这么多复杂的不同的需求,这就需要我在开发过程当中构想这个平台可以覆盖到高端、中端、低端不同应用场景。」 李哲哲表示。
「同时,在平台做系统升级以及迁移过程当中,尽量复用原来积累下来的硬件和软件的资源与经验,这样可以帮助客户节省大量的开发周期和开发成本,所以灵活性、拓展性和开发周期与成本,也是域控制器设计过程当中需要考虑的非常重要的因素。」
不过,即便供应商的域控制器底层标准化做得相对车企更便利,它们依旧还面临着一些现实的难题。
韩颖指出,主机厂的压力不仅仅在于软件团队的构建和能力的积累上,还在于组织架构上。
现在传统的主机厂组织架构还是按照原来功能划分的,比如说动力部、底盘部、车身电子部等等,而在未来架构中,很多开发是需要功能融合的。「这可能需要主机厂打破原有组织架构的界限,在组织架构上也进行一定的融合,目前来看也是相当有挑战。」
「除了汽车界所熟知的主动安全和被动安全等功能安全要求之外,还有网络安全问题。「毕舒展认为,智能网联汽车随时随地在联网,这个时候就随时面临着外界的各种挑战,包括黑客侵入,」 而这个时候你又会发现除了功能安全之外,信息安全也正面临巨大的挑战。」
旧世界已经逐渐崩塌,新世界仍在创建中。智能汽车的未来,任重道远。