引言
这几年国内汽车行业的格局着实发生了不小的变化,前有蔚来、小鹏、理想相继成功上市,并取得了相当不错的成绩,后有华为、中兴、小米等越来越多的消费电子、互联网企业开始 涉足汽车领域,开启了造车之路。
华为、小米这些 「搅局者」 发力的重点并不是行业老玩家们深耕的动力总成、底盘等领域,而是需要基于大量数据,通过软件持续迭代的汽车智能化领域。汽车智能化领域中智能驾驶有着相当大的想象空间和商业化前景,因此受到了各大公司的热烈追捧。
智能驾驶三大场景及技术演进
智能驾驶的技术栈并不简单,包括地图、定位、感知、规划、控制等领域,但这都是工程师需要关心的内容,用户是感觉不到这些东西的,他们能够感受到的是在什么场景下能够使用智能驾驶。从行业发展来看,智能驾驶应用的场景有这么三种:高速、环路智能驾驶;自主泊车;城区智能驾驶。
高速、环路智能驾驶
在长途旅行或一线城市的日常出行中,高速、环路上的驾驶往往占据了驾驶员大部分的出行时间。
由于高速、环路的场景相对单一,不会有频繁的红绿灯路口、不会有太多人车混行的路口,所需要面临的突发状况相对集中,整体上比较容易做到安全和舒适的平衡,因此成为各大整车厂重点发力的方向之一。配合上用户输入的导航信息,智能汽车可以自动进行超车换道和进出匝道,而不是简单地沿着车道巡航。
2019 年 5 月 Tesla 通过 OTA 的方式向国内车主推送 NOA 功能开始,高速、环路的智能驾驶功能就进入了人们的视线。随后不久国内造车新势力也紧跟 Tesla 的步伐,蔚来推出的 NOP,小鹏推出的 NGP,理想、智己等造车新势力的 NOA 功能也正在路上。
目前已经量产的导航辅助驾驶在高速上尚有一些无法很好解决的场景,比如高速巡航时突然出现的施工区域改道或停在护栏边上的故障静止车,这些都有可能因为辅助驾驶系统的漏检而出现事故,所以用户在使用时一定要清楚这套系统的边界,保持谨慎。
智能泊车
相信很多驾龄不短的司机都有过 「开车五分钟,停车两小时」 的可怕经历。很多时候,面对只有零星几个空车位的停车场,我们很容易像没头苍蝇一样碰运气找车位。有时候找到了空车位,但周围的车停的东倒西歪,导致入口太窄,停进去很难不碰到周围的车,只能放弃继续寻找。
面对消费者找车位难、停车难、取车难的这些痛点,研发智能驾驶的公司瞄准了这个拥有巨大潜力的市场 —— 智能代客泊车(Automated Valet Parking,简称 AVP)。相比于高速智能驾驶来说,智能泊车集中在相对封闭的停车场中,场景也不会像开放道路那么复杂,整体风险可控。
城区智能驾驶
相比于高速、环路和停车场的场景,城区场景是智能驾驶领域更加复杂,也是智能驾驶领域最难处理的场景之一。
智能汽车在城区道路或乡间小路上行驶时,将遇到随意横穿的行人、骑行人,异型车(拉货三轮车、工程车)、静态障碍物(水马、锥桶、垃圾桶、临时栅栏等)、路面小物体(三角警示牌、石块等)等。除了各种奇葩的障碍物外,还可能遇到弱光、逆光、暴雨、大雾等场景。

纯视觉的智能驾驶方案漏检以上任一目标,在智能驾驶时都有可能造成严重后果,而毫米波雷达由于角分辨率的限制,对于以上场景的检测信噪比太低,如果贸然拿来使用,会造成很多的虚警和误杀。因此以视觉 + 毫米波雷达为主传感器方案的智能驾驶方案,在这些复杂场景下的安全隐患还是很大的。
由于城区智能驾驶的难度很大,目前只有像智己和极狐这样的极少数几家整车厂在公开道路上进行了城区智能驾驶的测试。
智能驾驶的全场景闭环
无论是主流的车企,还是以消费电子、互联网企业为代表的 「搅局者」 都认识到打通城区 / 高速环路 / 停车场全场景闭环的重要性。全场景的闭环则意味着汽车可以在不用驾驶员干预的情况下,依次完成自动驶出停车场,城区自动驾驶、高速环路自动驾驶、再自动驶入停车场完成泊车的整套动作,这将极大提升驾驶员的驾乘体验。
很多车企在设计智能驾驶路线时,会先梳理出一个用户故事线(User Story)来帮助他们更好地进行技术规划。下面这张图是智己汽车对于智能驾驶全场景闭环的理解,这幅图有一个生动的名字 D2D(Door to Door,门到门)Pilot。
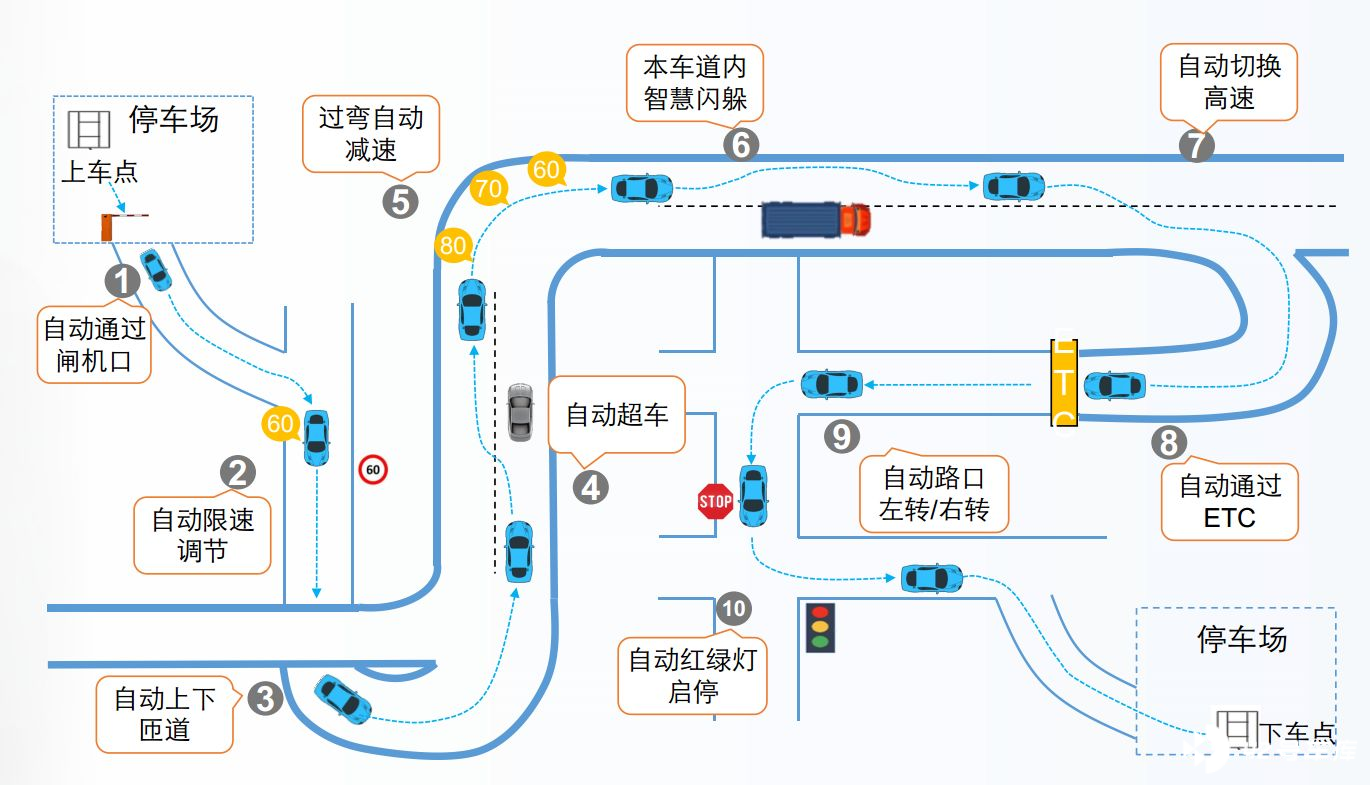
通过串联智能召唤功能、 AVP(代客泊车)功能 、 Highway NOA(高速智慧领航)功能 以及 City NOA(城市智慧领航) 功能与一体的辅助驾驶,完成整套驾驶任务。AVP、Highway NOA 和 City NOA 任一块功能的确实都将使得整个驾驶任务被打断。
智能驾驶的硬件升级
在前面城区智能驾驶的场景中我们提到了基于视觉和毫米波雷达的智能驾驶解决方案虽然能够实现简单的城区智能驾驶功能,但是或多或少地存在安全隐患,影响驾驶或者交通参与者的安全。而激光雷达的加入就是为了帮助智能汽车解决这些潜在的安全问题。
如果将摄像头类比成人类的视觉,那激光雷达就可以类比成人类的触觉。激光雷达发出的激光线束就像人类伸出去的手,摸在路面上、墙壁上。多传感器冗余,尤其是激光雷达的加入,能够更好地保障智能驾驶的安全。
从近期发布的,拥有智能驾驶能力的车型来看,安装了激光雷达的车型都不是顶配就是次顶配,中低配的车型在购买后,并没有升级硬件的途径,这使得这款车型的智能驾驶上限有限,可能从技术上就无法实现更高阶的智能驾驶功能。毕竟汽车不像手机这样的电子产品,无法做到一到两年就换新,这使得预算不够但又希望爱车在未来能升级智能驾驶功能的车主纠结好一阵子。
这就是智能驾驶领域中一个常被忽视的问题 —— 硬件升级。消费者对硬件升级的需求摆在那里。因此如何让汽车具备硬件可升级的能力,应该是各大车企需要考虑的问题。
目前我所知道的车企中,只有智己汽车对硬件升级做了技术规划。他们从传感器和计算平台领域设计了兼容激光雷达的软硬件架构冗余方案。如下为智己汽车与智能驾驶相关的传感器布局,在这些传感器中,3 个激光雷达可以选择以硬件升级的方式进行安装,这样就为那些中低配车型提供了硬件升级的可能性。

除了激光雷达传感器的硬件升级之外,智己汽车还能进行计算平台的升级。主控芯片由 Nvidia Xavier (30 TOPS) 升级为 Nvidia Orin X(500+TOPS),实现从十万亿次 / 秒级别到百万亿次 / 秒级别的算力飞越,以此来支撑更高级别 的智能驾驶功能落地。
总结
智能驾驶的意义到底是什么?
对于用户来说,当全场景的智能驾驶实现的那一天,他们出行的舒适度和效率都会极大提升,会有越来越多的用户为这些服务买单。
对于造车企业或者技术提供商来说,智能驾驶技术的市场蛋糕很大,谁能够更早地占领智能驾驶市场就意味着未来挣到的钱也会更多。
经历了移动互联网浪潮的洗礼后,无论是造车企业,还是消费电子、互联网公司都深刻意识到数据这些原本在汽车上看似不那么重要的能力,越来越凸显出它们的价值。他们当然不愿意错过智能汽车这个 「数据终端」。智能驾驶又作为智能汽车上最重要的数据中心,也理所当然地成为各大公司竞相追逐的领域。