相信关注辅助驾驶的朋友们前端时间已经在朋友圈看到了理想 ONE 车主秀他们花式使用辅助驾驶的视频。
首先我要跟大家强调,这是一种极端危险的使用方式,因为理想 ONE 现阶段的辅助驾驶是随时需要驾驶员进行接管的,一定要随时处于待命状态。为了让大家认清理想 ONE 这套辅助驾驶系统的边界,我和知乎的拆车实验室一起进行了探索。
2021 款理想 ONE 上负责参与辅助驾驶功能的传感器有两大类,分别是摄像头和毫米波雷达。


如果将辅助驾驶功能和人做类比,安装在挡风玻璃下方的摄像头,它就像我们人类的眼睛,能够识别车道线、障碍物、各种交通标志等;安装在车辆正前方和四个角上,共计 5 个毫米波雷达就像人类的耳朵,能够帮助辅助驾驶系统 「听」 到摄像头视野范围之外的障碍物,以此来进一步保障行车安全。
人类驾驶员会根据自己在驾驶时看到和听到的信息进行思考,随后通过大脑这个思考中枢下发动作用手、脚控制车上的方向盘等设备对汽车进行控制。辅助驾驶系统也有相似的逻辑,在 「看到」 和 「听到」 了各种交通信息后,由理想 ONE 的中央控制器,也就是辅助驾驶系统的大脑,统一处理这些信息,并计算出方向盘的转角以及刹车或油门踏板的开度,将这些信息下发给底盘,也就是理想 ONE 的手和脚实现控制。
2021 款理想 ONE 相比于 2020 款在传感器上有两个重大升级。
首先是理想 ONE 「眼睛」 的升级。辅助驾驶系统的 「眼睛」 由两部分组成,其一是摄像头,其二是处理图像信息的视觉感知芯片。2020 款的理想 ONE 的 「眼睛」 是由国际领先的视觉感知供应商 Mobileye 提供的,摄像头像素 130 W,视场角为 52°,感知芯片的算力为 2.5 TOPS。2021 款理想 ONE 使用的是国内领先视觉供应商地平线,摄像头的像素升级到 800W,视场角为 120°,图像处理的算力由两片征程 3 提供,算力最高可达 10 TOPS。像素和视场角的提升有助于减少近距离盲区,增加横向探测范围,能有效提升匝道和大曲率弯道的识别能力。
其次是理想 ONE 「耳朵」 的升级。2020 款理想 ONE 只有一个朝向正前方的毫米波雷达,这就意味着后方稍远的目标完全无法识别,升级后的理想 ONE 在汽车前方和四个角上都安装了毫米波雷达,雷达的探测角为 150°,最远探测距离可达 110 米。新增的毫米波雷达,能够提升高速巡航时侧方和后方的感知能力,使理想 ONE 在进行主动换道时能够实时监视后方来车,进而实现导航辅助驾驶的功能。

这里说个题外话,理想 ONE 作为第一个使用地平线征程 3 芯片的整车厂,为什么会放弃国际上技术顶尖的 Mobileye,而转向国产芯片呢?从我的角度来看有这么几点原因。首先是 Mobileye EyeQ4 是 2018 年发布的芯片,算力和视觉感知性能的天花板太过明显,直接限制了理想 ONE 辅助驾驶的能力上限;再者,我曾在 2017 年某主机厂工作时,跟 Mobileye 的人打过交道。因为 Mobileye 的视觉算法是按照美国、日本、以色列的路况设计的,或多或少在国内出现水土不服的情况,给他们反馈需求或问题时,拉拉扯扯的时间很长,配合度很低,这种迭代速度根本无法满足国内智能汽车的软件迭代速度,而像地平线这样的国内厂商,他们提供的视觉感知能力不仅更适合中国路况,还能够保证足够快速的迭代速度。
说了这么多 2021 款理想 ONE 在硬件上的提升,那么它的辅助驾驶功能实际表现如何呢?
我跟知乎拆车实验室根据理想 ONE 已经在 Q2 发布的功能,选择对理想 ONE 的自动紧急制动 AEB 功能和辅助驾驶系统的识别能力进行一轮摸底测试。
在测试前,我们一定要清楚自动紧急制动 AEB 和辅助驾驶系统的区别。
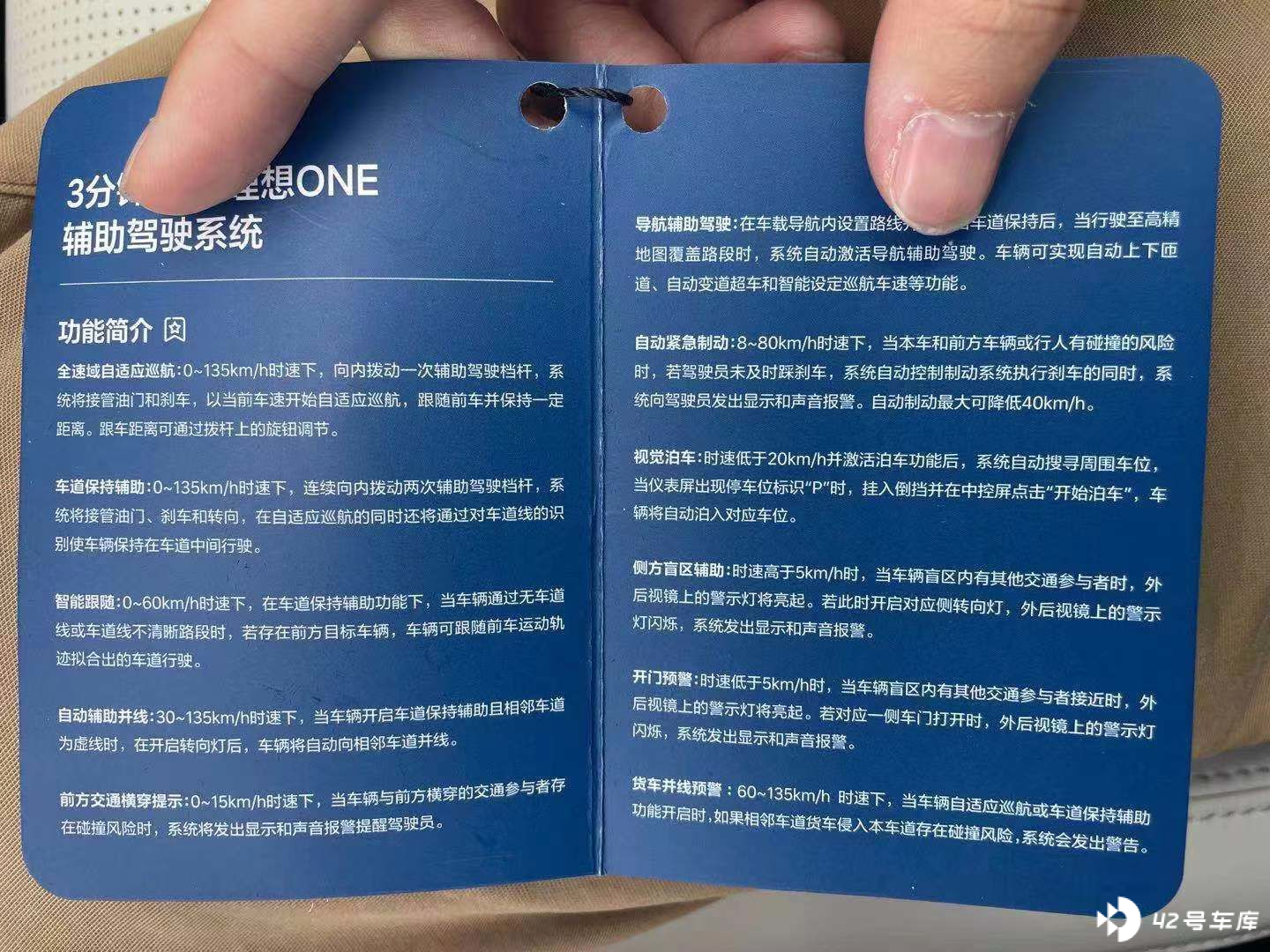
自动紧急制动 AEB 用理想 ONE 的官方描述是在 8~80 km/h 时速下,当本车和前方车辆或行人有碰撞的风险时,若驾驶员未及时踩刹车,系统自动控制制动系统执行刹车的同时,系统向驾驶员发出现实和声音报警,自动制动最大可降低 40 Km/h。它是一套随时处于激活状态的系统,一旦这套系统判断现在有碰撞风险,就会主动激活刹车进行全力的制动,这套系统控制车辆的优先级是很高的,即使驾驶员在 AEB 触发时踩着油门的也是没法给车加速的。
而辅助驾驶系统,具备自适应巡航、自动辅助转向、加速和制动等功能的驾驶系统,想要理想 ONE 进入自动驾驶系统,需要驾驶员主动进行两次拨杆,是一个需要主动触发的系统。当驾驶员进行两次拨杆后,汽车的方向盘和刹车油门踏板都将交给 AD 系统进行控制,驾驶员作为监视,可以随时把控制权拿回来。
为了摸清理想 ONE AEB 和辅助驾驶的性能边界,我们构造了很多种场景。
假人 AEB 测试过程
我们首先构造了假人的测试场景,包括静态成年假人碰撞、静态儿童假人碰撞以及横穿成年假人碰撞实验。
测试过程并不顺利,因为根据前期的调研结果和对理想 ONE AEB 功能的预期,我们认为理想 ONE 应该是低速情况下能够稳定刹停,高速情况下可能刹不住。但最终的结果是却让人匪夷所思。无论是面对静止的成年假人、儿童假人还是横穿的假人,我们可以看到中控屏上假人很早就稳定显示,但整个碰撞过程既没有任何告警,也没有任何刹车动作,与卡片上的描述完全不符。

测试的过程中我们一度怀疑自己是不是 AEB 的开关没开、或者软件版本不对、甚至是我们的车辅助驾驶系统坏了导致的 AEB 失效,但最终经过现场多次确认,并与理想 ONE 客服进行沟通,我们很确认我们的车、软件版本和操作方式都没有问题。那么问题到底出在哪里呢?
为了确认理想 ONE 的辅助驾驶系统是否真的能对假人做出反应,我们立马使用相同的场景测试了它的辅助驾驶功能。
测试的结果可以看出在辅助驾驶开启的情况下,对于静态成年假人,巡航车速最高支持 65 km/h 的稳定刹停,当成年假人横穿时,巡航车速最高支持 40 km/h 的稳定刹停。

假人 AEB 测试的结论
从辅助驾驶系统巡航时能够对假人稳定刹停的现象可以看出,理想 ONE 的这套辅助驾驶系统是能够对假人做出稳定识别的,与我们测试时在中控屏上看到的信息是一致的。这说明换了 「眼睛」 的理想 ONE 是能够看得见假人的,只是 AEB 的功能在面对行人,进行了忽略。通过这些测试可以看出,针对行人的 AEB 功能,完全达不到官方所宣传的能力。
假车 AEB 测试过程
测试完假人后,我们进行了 AEB 和辅助驾驶对假车的测试。
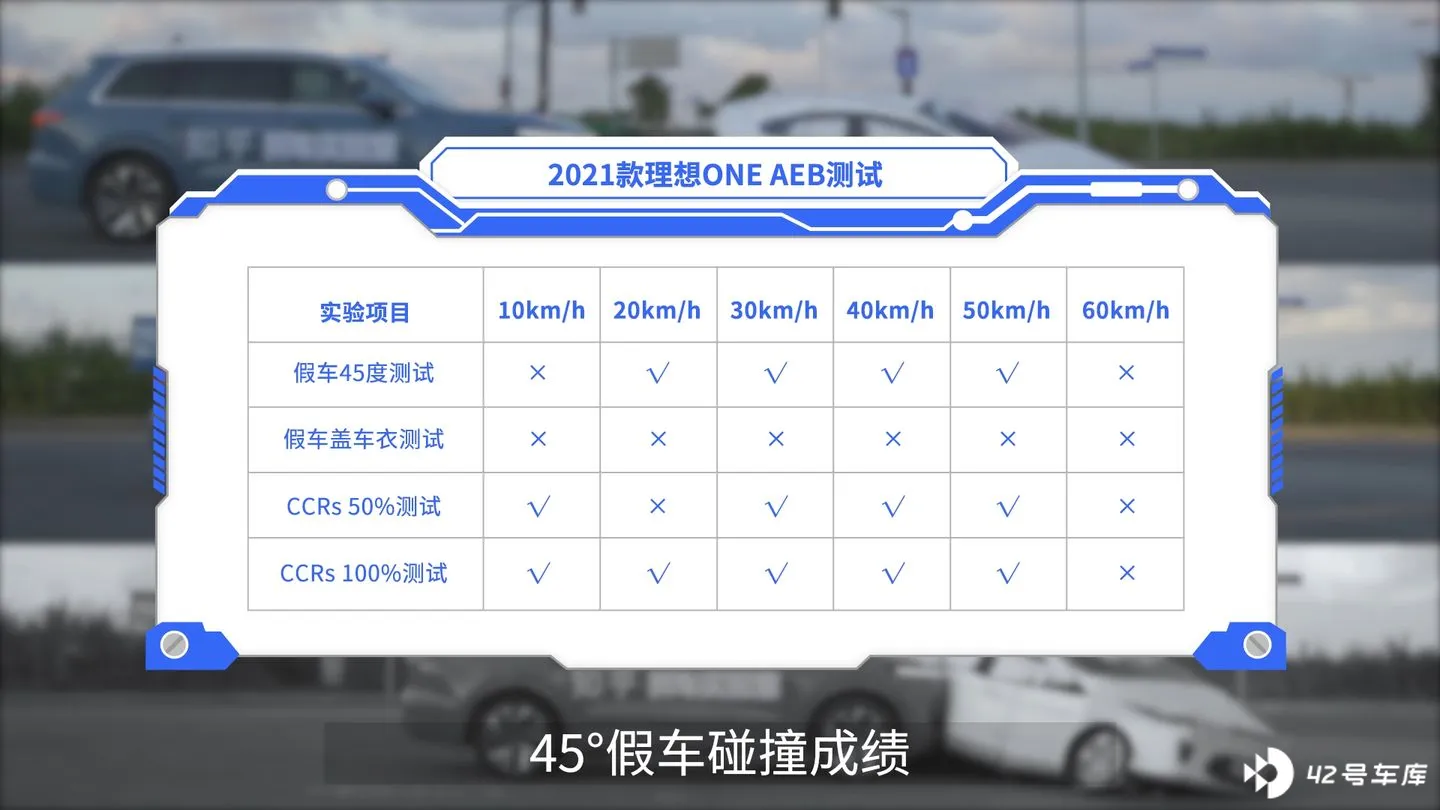
我们首先做了最为常规的静态假车 100% 正面碰撞。通过 5 km/h 到 80 km/h 的碰撞测试,我们发现理想 ONE 的中控屏上是能够稳定显示假车的,且在 60 km/h 时速以下时基本能够实现稳定的 AEB 制动刹车,但当时速在 60 km/h 甚至以上时,理想 ONE 的 AEB 表现就不那么理想了,都未能刹停。



我们在同样的场景下测试了一下辅助驾驶,发现辅助驾驶的表现超过了我们的预期,在最高 90 km/h 时速的情况下,能够稳定检出假车,且能够制动、刹停在前车前。
后续的测试,我们在原来的基础上增加了难度。
首先是隧道场景,我们测试了它在 30 km/h 的表现,可以发现进入阴影前 20 米有识别到,但刹车动作只持续了一会,没有完全刹住,刹车过程中有报警。隧道场景 AEB 挑战失败。

随后我们又模拟了一下雨雾天气,无论是普通雨雾环境,还是大暴雨环境的 AEB 测试中,理想 ONE 都能够稳定识别前车,但是 10~30 km/h 的测试中都没有任何制动动作。雨雾场景 AEB 挑战失败。对比一下拆车实验室好几个月前测试的 Model Y 在雨雾中 60 km/h 下都能稳定刹停的表现,不得不佩服特斯拉的厉害之处。

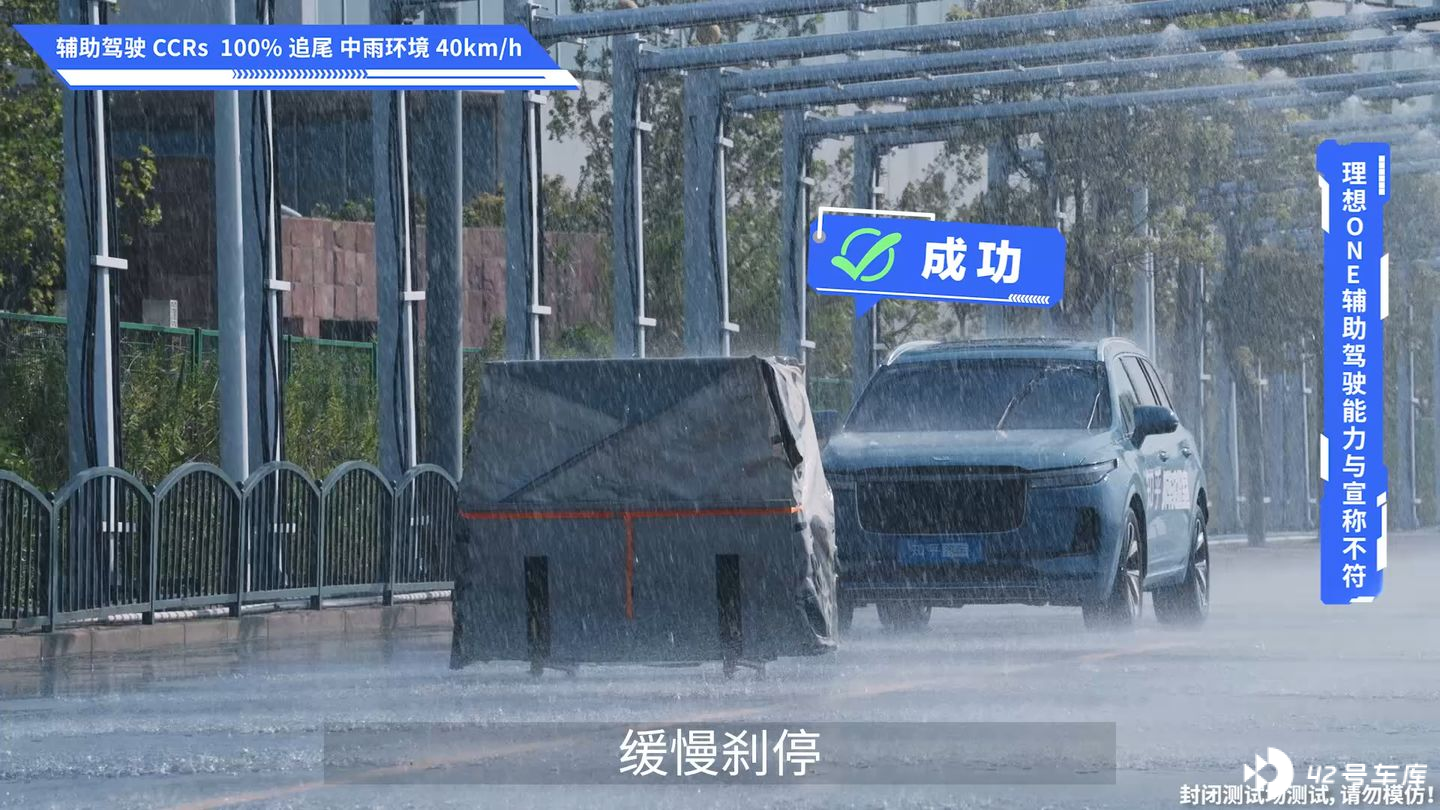
我们也测试了一下辅助驾驶在雨雾天气下的表现,我们发现辅助驾驶可以在普通雨雾环境中做到 40 km/h 缓慢刹停,更高车速时虽然有制动,但是无法完全刹停。这说明雨雾对目标车辆的检测距离还影响较大。

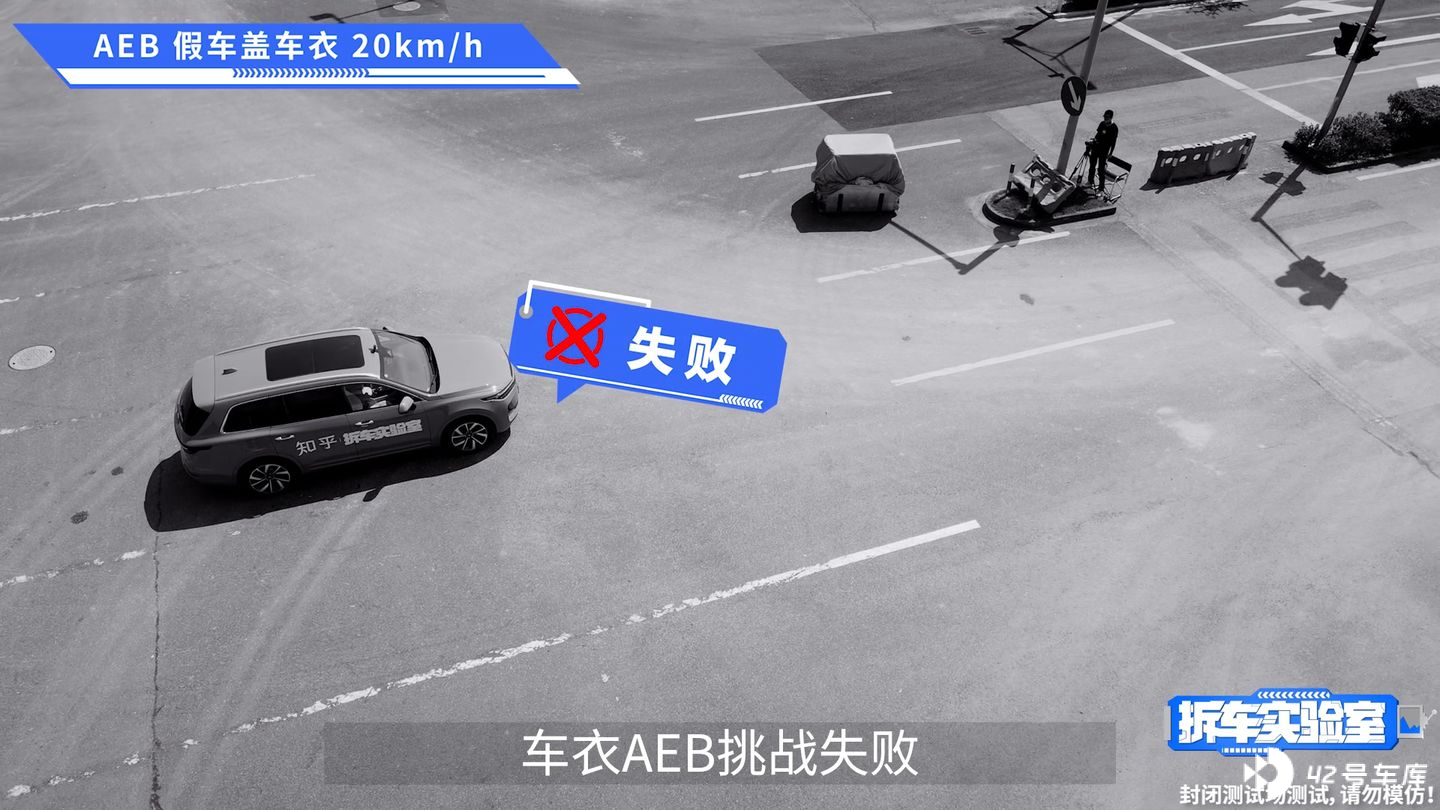
随后我们直接将难度再度提高,给假车盖上了车衣。在这种场景下,AEB 即使是在 20 km/h 的情况下也无法制动刹停,这就说明理想 ONE 当前无法识别盖上车衣的假车。车衣 AEB 挑战失败。
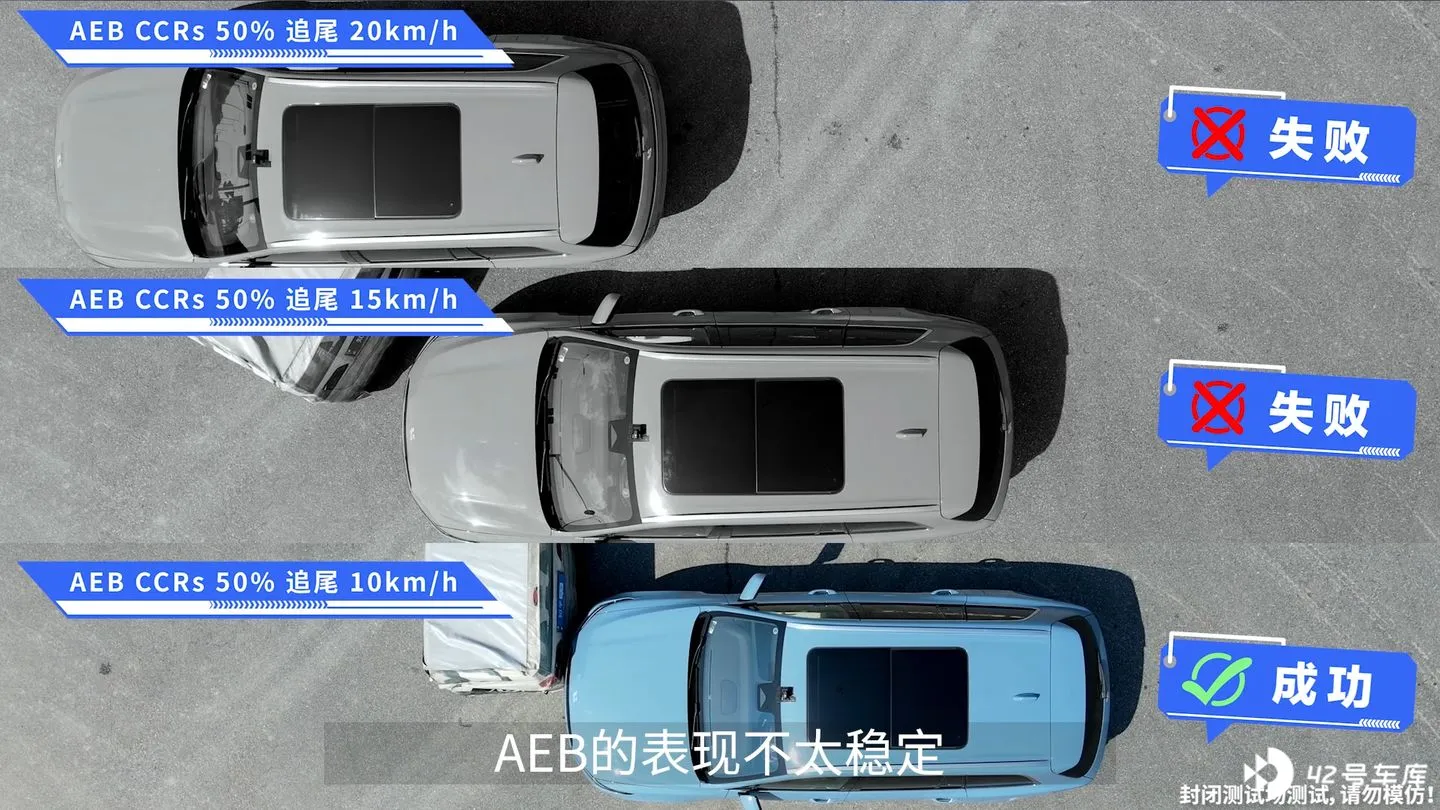
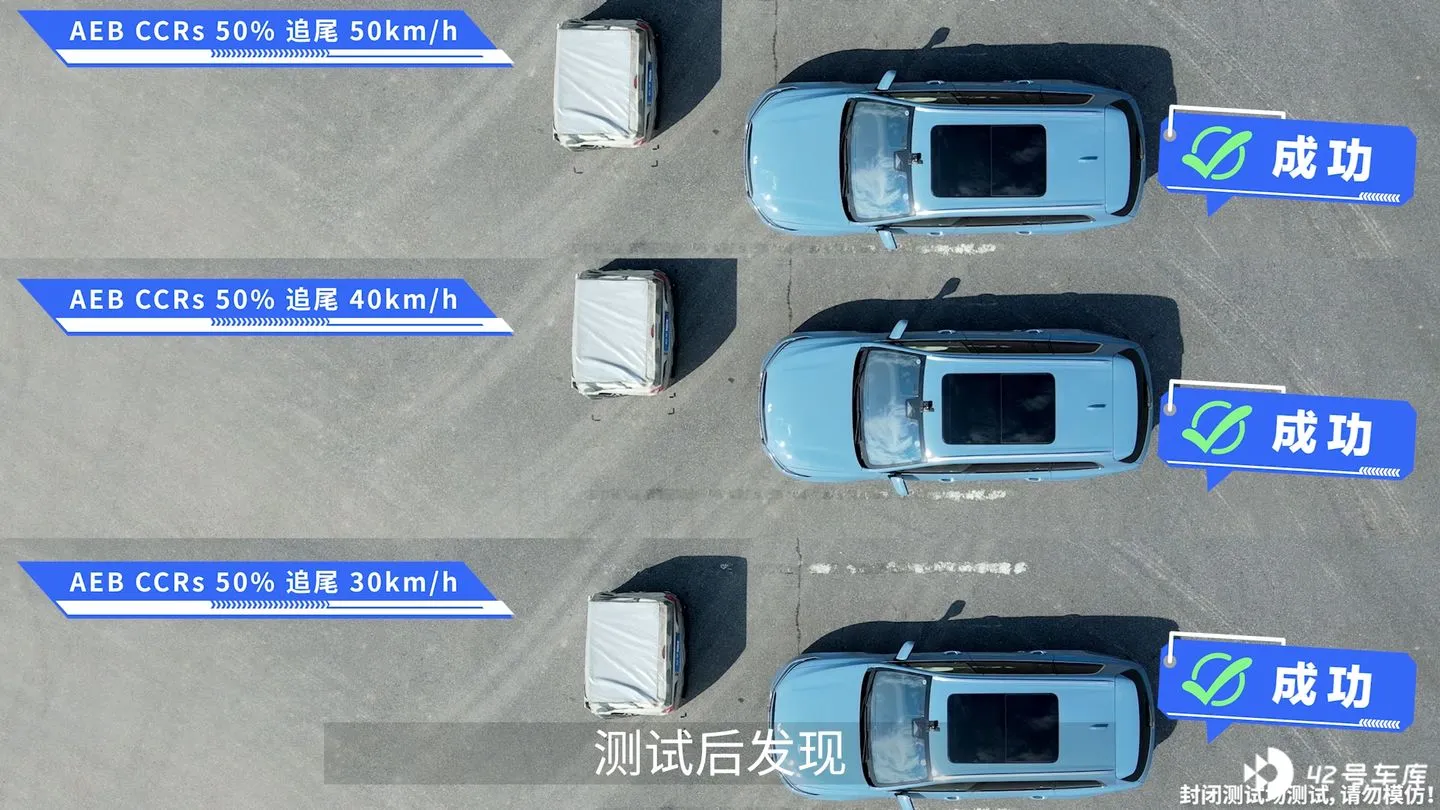
做完静态假车 100% 正面碰撞后,我们将假车做了一些移动,构造出了静态假车 50% 正面碰撞场景。在这个测试中,我们发现当车速低于 20 km/h 时,假车识别得不太稳定,当我们继续提高车速测试后发现车速最高达到 50 km/h 时能够实现刹停,更高车速的情况下,无法刹停。
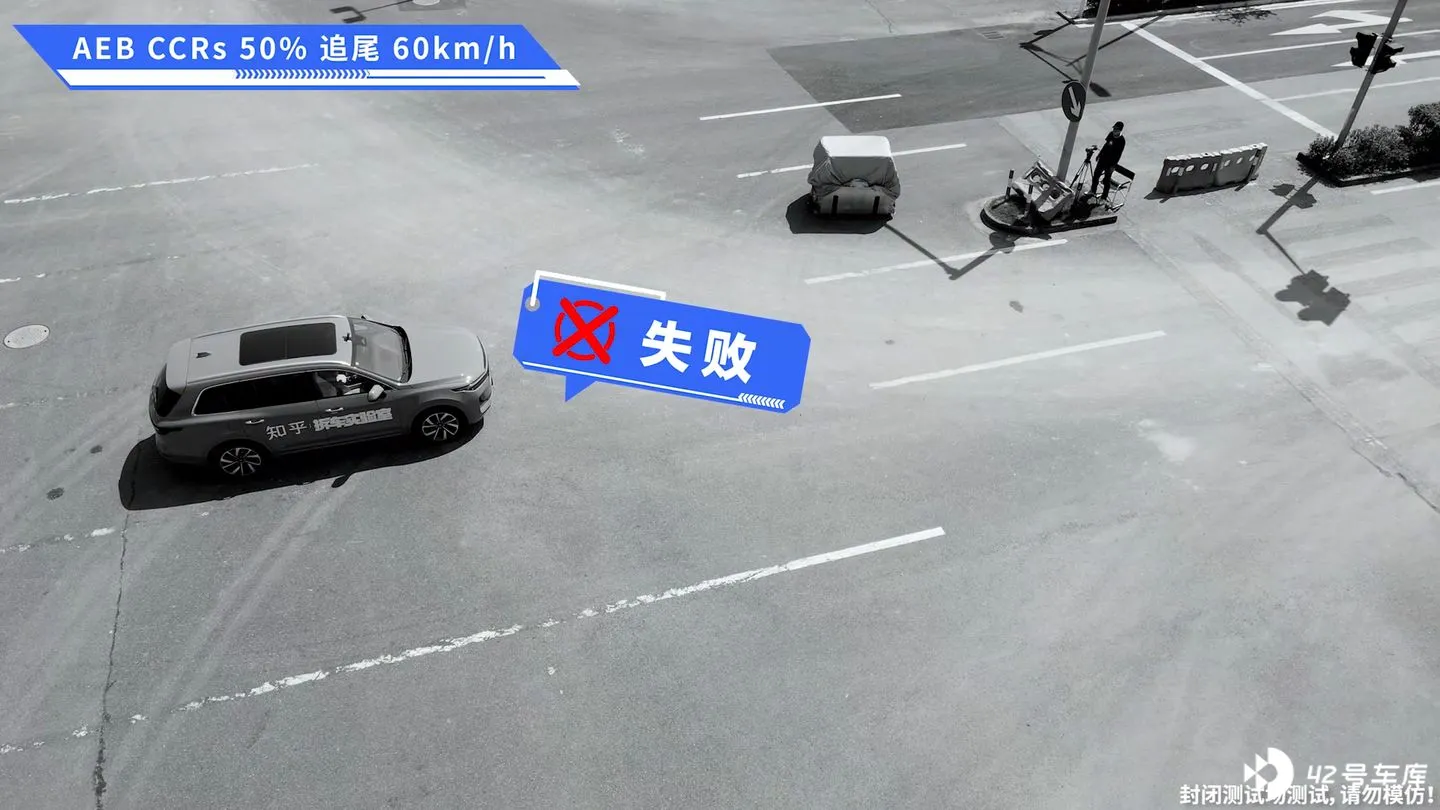
假车 AEB 测试结论
通过这些测试可以看出,理想 ONE 的 AEB 功能面对假车的表现比面对假人好了很多,但还是没有达到理想宣称的 8~80 km/h 的范围。
通用障碍物的测试
假车和假人的测试完成后,我们还准备了很多生活中的常见物体。分别是自行车、三轮车、水马、锥桶、垃圾桶等。这些物体摆放在理想 ONE 前方时,中控屏上没有任何显示,也就是说眼睛看不到这些东西,AEB 和辅助驾驶系统大概率不会对这些东西产生反应,这与我的猜想一致,这些场景物体的挑战统统失败。
单独的自行车、三轮车没有反应,我们测试了真人骑车的场景。我们发现辅助驾驶系统可以检测到骑车的人,但当人把自行车停下,离开时,车辆会立刻加速,这再一次说明辅助驾驶系统目前只能识别人,无法识别单独的自行车、三轮车,如果人消失在视野中,单独的自行车和三轮车是无法识别得到的。
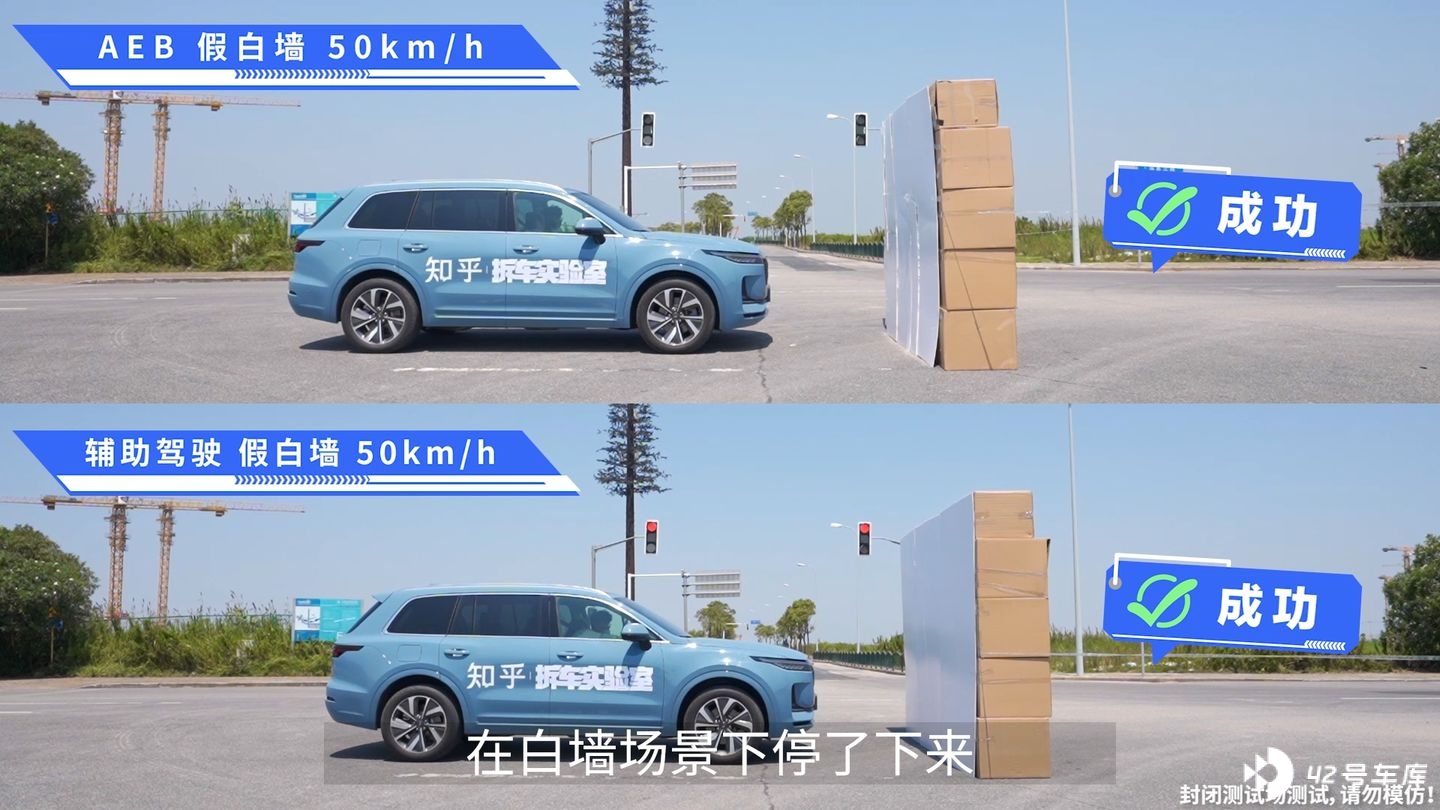
最后我们做了一个彩蛋,那就是白墙测试。白墙测试是特斯拉 Model Y 无法处理的场景,那么 2021 款理想 ONE 面对白墙时会做出什么样的反应呢?
我们发现理想 ONE 出人意料地能在白墙场景下停下来,无论是 AEB 还是辅助驾驶都可以在最高 50km/h 的测试中停下来。中控屏上可以看到,白墙被识别成了货车。但当我们把白墙换色变成纸箱墙时,AEB 和辅助驾驶都没有任何反应,直接撞飞。这说明地平线对特斯拉都搞不定的白墙场景,进行了专门的优化处理。
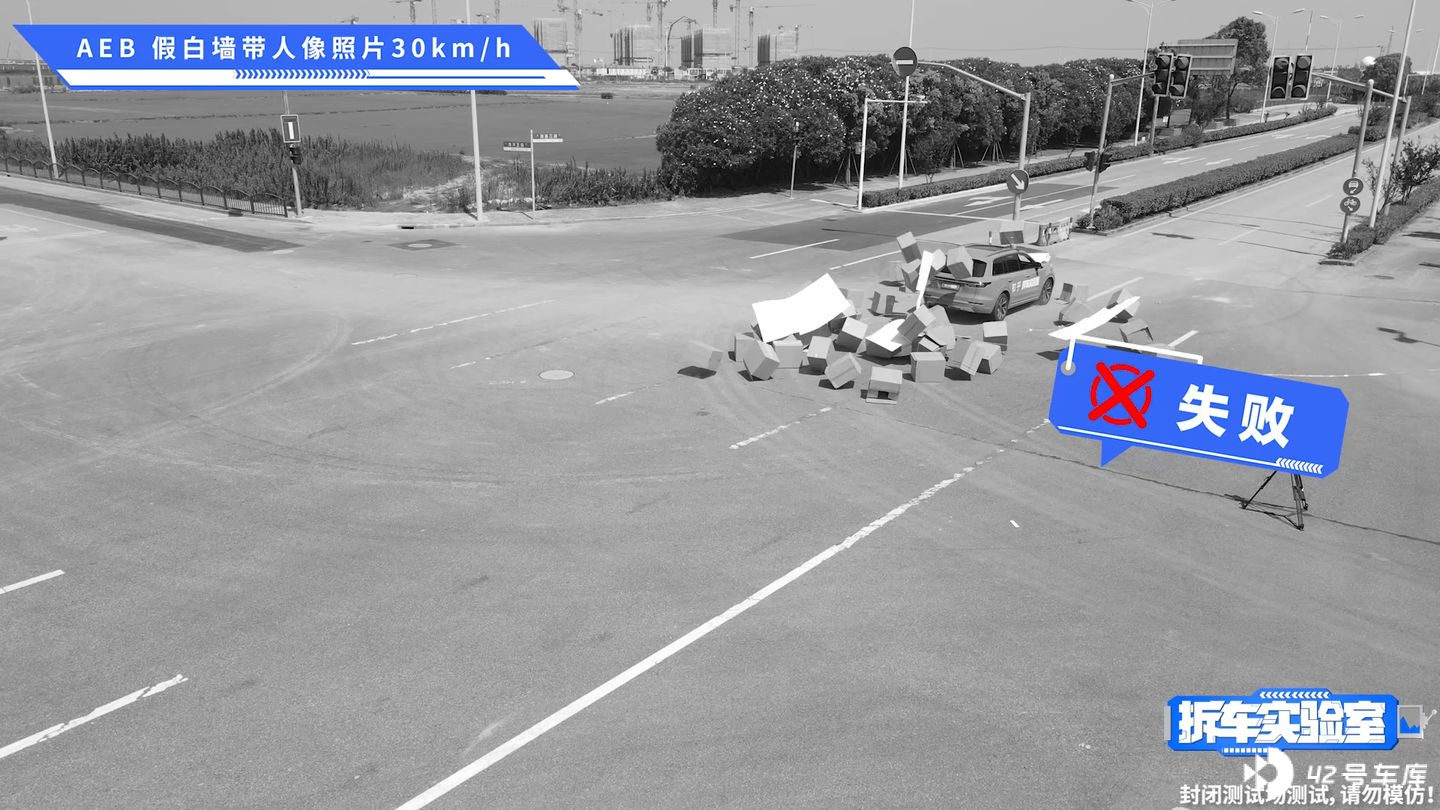
最后我们在白墙的基础上贴上了人像照片,发现 AEB 在有人像照片的白墙场景下,没有任何制动动作,直接撞飞,而辅助驾驶模式下能够稳定识别为人,最高可以在 70 km/h 时稳定刹停,这与我们测试假人的结果是一致。

通用障碍物的结论
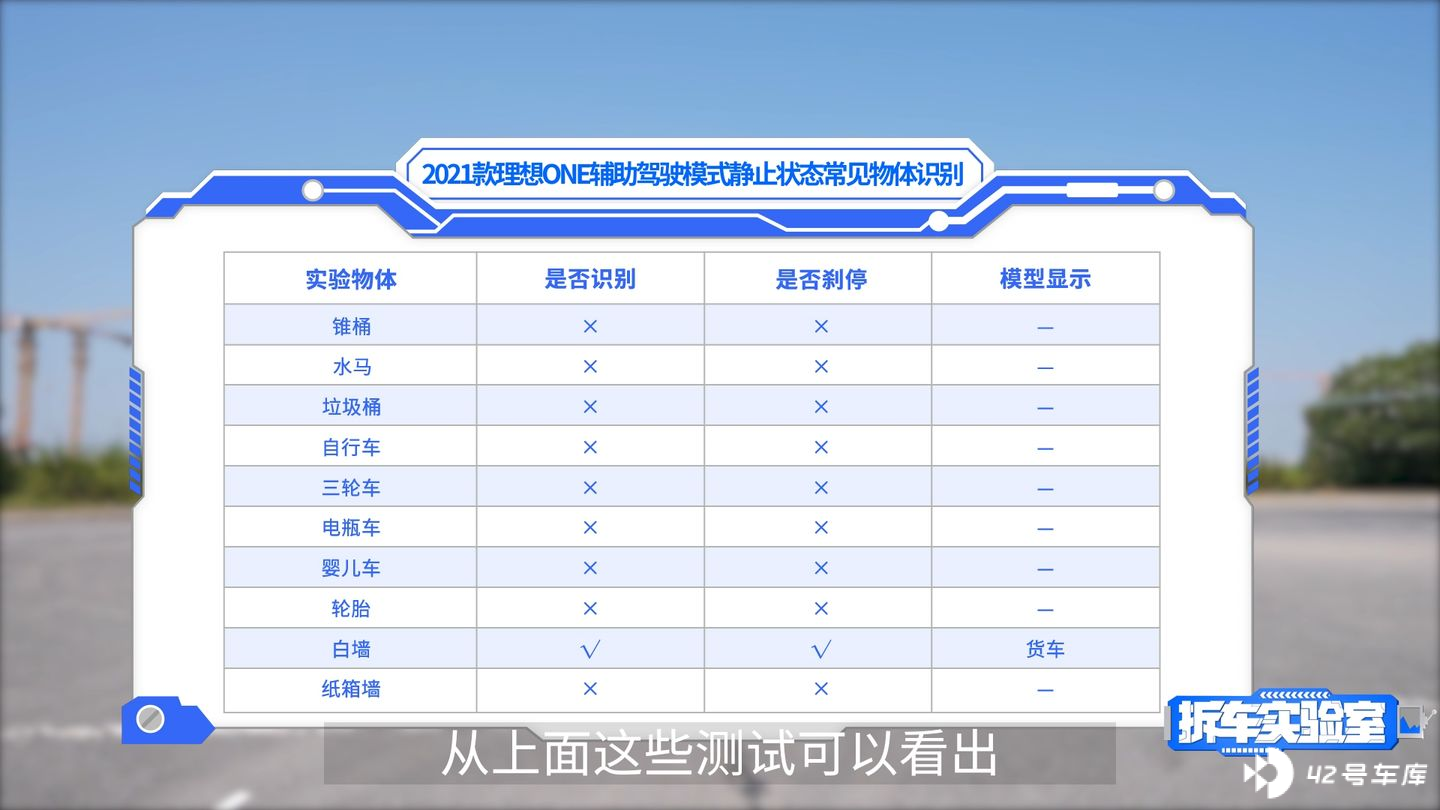
从上面这些测试可以看出,除了白墙场景外,理想 ONE 对于常见物体的识别和处理能力都还有限,目前尚不确定是国产地平线未能检测出这些东西,还是理想还未做好这方面的处理。这些常见物体的处理能力,可能还要在后续的 OTA 升级中才能具备。
结论
好了,上面就是我们对理想 ONE AEB 和辅助驾驶功能的摸底测试。
整体上来看,2021 款理想 ONE 在传感器和计算平台上有了很大提升,但由于换了一双 「国产眼睛」,多了几个 「耳朵」,一时没有完全适应,导致整体表现不如上一代车型。不过我还是很相信理想 ONE 自动驾驶团队的能力的,这些可见的 Bug 应该是很快能够通过 OTA 进行升级解决的。