

作者:Ella
自动驾驶成为前沿汽车领域研究的新热点,受限于当前的自动驾驶技术,要实现完全的无人驾驶依然需要一段时间。在停车过程中,由于驾驶速度慢等原因,实现起来相对容易。另一方面,停车难也是市场长久以来的痛点。根据 JD.POWER 中国消费者自动驾驶信心指数调查发现,停车场景(即自动泊车)是超四成消费者期待最先实现无人驾驶技术落地的场景。
目前比较有代表性的自动泊车技术是威马公共停车场无人免学习代客泊车技术(PAVP),其可以实现在公共停车场的自动泊车。首发搭载于威马 W6 车型,并通过 OTA 发布上市。这里,我们可以做一下解析。

什么是 PAVP?
传统的自动泊车有 3 种路线,一种是自动泊车辅助技术 APA。APA 也是目前采用最普遍的技术,该技术通过车载传感器、处理器和控制系统来辅助驾驶员进行自动泊车。APA 又分为 semi-APA 和 F-APA。前者是半自动 APA,半自动 APA 在泊车过程中,系统只会接管横向引导系统,即转向系统的控制。但纵向引导系统,如油门、制动、档位依然需要驾驶员操作,因此该项技术依然需要驾驶员的全程介入。而 F-APA 是全自动泊车辅助,该技术可以同时接管横向引导系统(转向控制)和纵向引导系统(油门、制动、档位等),因此驾驶员可以脱离操控,自动化性能进一步提升。但是该技术需要驾驶员始终坐在汽车驾驶位进行监控。
另一种技术称之为遥控泊车辅助(RPA)。RPA 可以实现让驾驶员离开驾驶位,在车外的一定距离范围内,使用遥控器控制车辆进行泊车。它当时诞生主要是为了解决车辆停车以后在狭窄区域驾驶员无法开门下车。但是该技术依然需要驾驶员在车辆附近进行操控,并且目前的应用并不广泛,仅在少数高端车系采用。
第三种技术路线是停车场记忆泊车,该方法需要汽车提前记录路线,形成记忆路线和记忆车位,并根据记忆进行自动泊车。因此,这种方式比较适用于高频固定车位,而对公共停车区域的自动泊车,无法使用。
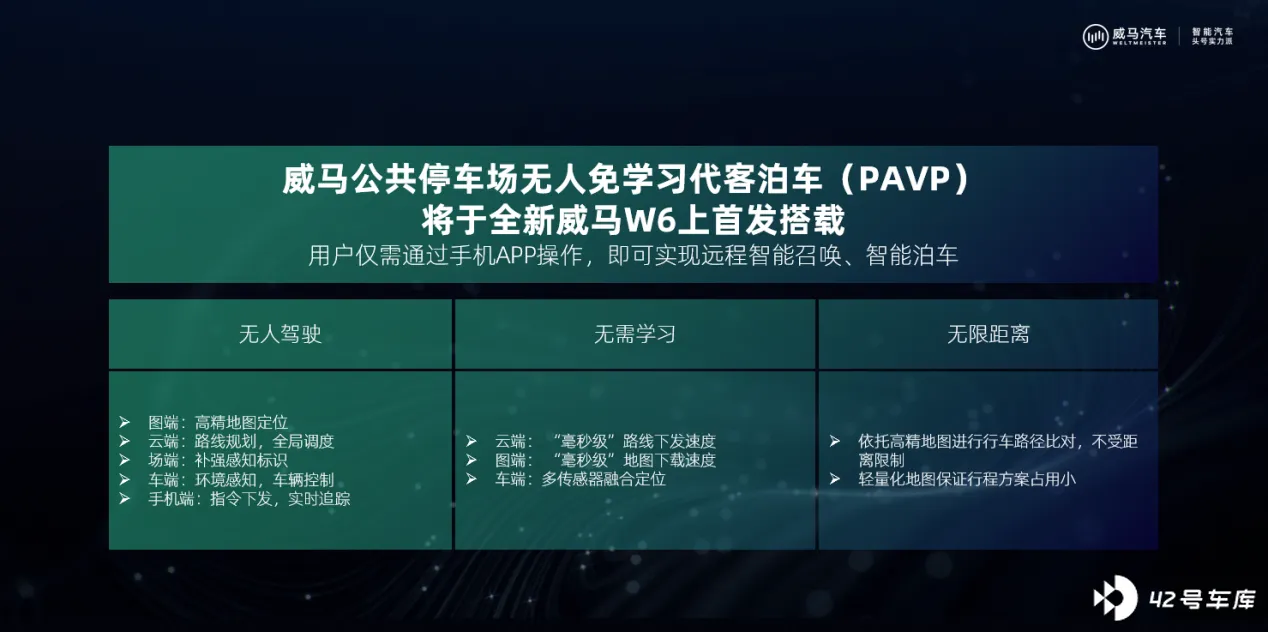
威马提出了第四代的泊车技术,即无人免学习自动泊车 PAVP(Public Automated Valet Parking,公共场所自动代客泊车)。在这项技术里,可以实现远程泊车,同时不需要驾驶员参与,也不需要车辆提前学习和记忆路线。可以称之为真正的无人驾驶。
在使用过程中,驾驶员无需进入停车场,下车后可以通过手机 APP 操控,让车辆自动驶入停车场寻找停车位进行泊车。而当驾驶员需要使用车辆时,通过手机 APP 召唤汽车驶离停车场,去指定的接驳点等待驾驶员上车。因此,PAVP 具备 「无人驾驶」、「无需学习」、「无限距离」 三大特色。
当然威马的此项技术,仅仅适用于低速的自动泊车场景,离真正的自动驾驶依然还有一段距离,但是笔者认为泊车是实现自动驾驶最好的突破口,也是各大厂商最容易做出成绩的地方。
实现 PAVP 的几大要素
环境感知 —— 传感器
传感器是汽车的眼睛,是实现自动驾驶的基础。目前车用传感器主要是车载摄像头、毫米波雷达、超声波雷达和激光雷达四大核心部件构成。
车载摄像头以图像识别算法为基础,主要负责外部图像环境感知与分析,在自动驾驶传感器领域有着至关重要的作用,是自动驾驶的 「汽车之眼」,可以有效识别和分类各类物体和行人,但容易受到天气和环境光影响。毫米波雷达运用 24-300GHz 的毫米波进行环境感知,可在恶劣天气或光线较暗条件下稳定工作,同时可以有效测量障碍物距离与方位,但缺点是不能区分行人和物体。超声波雷达是通过声学原理,通过超声发出和发射的时间差来确定距离,在近距离低速状态下的测量精度高,因此非常适合在自动泊车场景下使用,而且超声波雷达价格便宜,性价比很高。激光雷达用到是一种叫做 TOF(Time of Fly) 技术,即通过扫描等的方式向四周发射激光,当遇到物体光线,通过计算发出和接受到的激光束的时间差来确定物体的位置,以此形成的激光点云可以给自动驾驶汽车绘制一副三维地图,与超声波雷达不同,激光雷达的精度最高,在远距离测绘下依然表现优异,但是属于后起之秀,技术还在逐步发展和完善中,因此价格也最贵,仅在高端车系上采用。
由于不同传感器的特点差异,目前主流的做法是将这些传感器进行组合,从而形成比较完备的汽车检测识别系统。
在威马搭载 PAVP 的 W6 车型中,共使用了 23 个传感器,包括 2 个前视摄像头、4 个环视摄像头、5 个毫米波雷达和 12 个超声波雷达。另外还有 1 个驾驶行为检测摄像头,不用于自动泊车。
笔者汇总了几大前沿自动泊车技术的新势力汽车品牌,可以看到在传感器方面威马 W6 还是略逊色于其他品牌车型,特别是在摄像头和激光雷达的使用上。

行为决策 —— 百万云端算力
传感器获取到的信息需要根据算法进一步处理,以帮助汽车提高决策依据。越高的算力代表着更快的计算速度,也代表了汽车的脑力越强。
小鹏 P5 搭载的英伟达 Xavier 芯片不同,威马选择与百度合作,依靠云端服务器进行计算,最高算力可以达到 100 万 TOPS 级别。
目前主流的车型都是采用车载芯片提供算力,而威马 W6 属于另辟蹊径,采用的是云端的方式进行计算,这样可以获得更高数量级的算力,也方便 OTA 的后续升级。

在具体数据处理方式上,云端算力和车载芯片略有不同。以小鹏 P5 为例,传感器在探测的同时,芯片进行计算,相当于在边看的过程中就把特征图建成了。
而威马则需要先记下所有的感知数据,再上传到百度 Apollo 云端服务器,它的云端算力最高能达到 100 万 TOPS 级别,为所有威马 W6 提供云端算力。整个上传、学习、下载的整个过程大概需要 1~2 分钟。如果遇到没有网络的情况,威马 W6 能依靠威马和百度 Apollo 共同合作开发的 ACU-Advanced 车载计算平台完成本地计算。同时车内配备有高通骁龙 8155 芯片,可以提供数据处理和计算。
据了解,百度从 2013 年开始就布局进入自动驾驶市场。其推出的 Apollo 自动驾驶平台,从一开始主要针对的就是自动泊车领域,而威马 W6 正是首款搭载该平台落地的车型。此外,百度对威马也进行了投资,持股比例占 5.96%。
路径规划 —— 百度地图引擎 5.0
自动泊车技术除了依靠传感器以外,为了更加准确、全面判断车辆周边环境信息,地图的重要性不言而喻。特别是针对 L3 以上的自动驾驶技术应用于自动泊车技术领域,高精度地图是业内公认的必选项,可以大幅提升整个系统的鲁棒性,减少车辆感知系统的压力。
在高清地图上,威马再次选择和百度联手合作,搭载有百度地图引擎 5.0 版本。和之前的 3.0 版本相比,其算力速度更快,定位更加精准,整体性能得到了提升。并且地图精度达到 15cm,可以实现跨楼层的地图识别。并通过百度云将停车场的信息和地图数据包下发至车辆,帮助车辆进行提前的调度和车位判断。高清地图和云端算力支持都装配于百度自研的黑盒子 ——ACU-Advanced 车载计算平台。实现高精建图和定位、环境感知、规划控制以及数据回传、云端训练、升级算法等功能。
写在最后
未来整个自动驾驶的技术发展体系将是围绕车端、云端、路端同步升级发展。而威马 PAVP 技术正是集合了车端、云端、图端、场端、手机端五 「端」 一体。整体上而言,威马 PAVP 系统能在同行业里对比优势明显,也符合未来用户的需求与痛点。如果要说还有什么值得优化的地方,在传感器的布置上,W6 整体摄像头搭载偏少。百度的 Apollo 平台非常关注纯视觉感知,因此摄像头的数量可能会影响其算法的实现和最终展示。期待威马在后期推出的车型和 OTA 升级。















