

第 16 期
打破边界,以 「自定义智能」 的心态与格局,拥抱、融入变革,是越来越多新能源汽车厂商甚至是生态圈参与者的必然选择。
回顾前两年,小鹏汽车在辅助驾驶上做出的努力,先后推出高速场景的 NGP 导航辅助驾驶、城市场景的 NGP 导航辅助驾驶功能。
此次,小鹏汽车的着重点依旧在辅助驾驶上,只不过这次技术更成熟了。10 月 24 日,小鹏汽车的新一代感知架构 「XNet」 正式亮相,并引入了 TransFormer 网络与 BEV 技术。
这也意味着,在这样的自定义智能模式下,整车开发将实现从自动驾驶到无人驾驶的转变,同时迭代速度将显著提升。
在智能汽车方面,小鹏汽车自动驾驶副总裁吴新宙透露,希望能在 2023 年或 2024 年在广州开启测试运营,并在 2025 年 Robotaxi 和硬件能力的发展可以实现会师,小鹏将向全面自动驾驶与无人驾驶进发。
为何要做城市 NGP?
在讲小鹏为何要做 CNGP (城市 NGP) 之前,吴新宙向我们抛出了这样一个问题:「为何要做难百倍以上的城市场景?」
比起封闭道路的高速场景,城市用车场景错综复杂,存在有单向、多向、多层的可见车道,以及对逻辑、定位等都具备非常大的挑战,甚至是交通不规范的停车、用车都成为城市场景的不确定因素。

但对小鹏汽车来说,城市场景的辅助驾驶是必须的,也是迈向新能源汽车市场下半场的关键。
据数据显示,用户的总用车里程中,城市道路占比高达 71%,换成用车时长维度可达 90%,通勤城市道路用户占比 100%,因此,城市场景对用户而言,既是高频也是刚需。
为此,想要完善城市 NGP 的复杂场景就需要更强软件能力做支撑。


具体来看,小鹏汽车的城市 NGP 与 LCC 增强版均采用了全新技术架构,分别从定位、感知、预测、规控等方面进行了提升。相比高速 NGP,城市 NGP 的代码量提升了 6 倍、感知模型数量提升至 4 倍、预测、规划、控制相关代码量达到了 88 倍。简单来说,在实现城市导航辅助驾驶中,系统拥有更多的东西,也拥有了更多的自主决策权。

同时,吴新宙还表示,通过多传感器的融合,经过初步训练,可以拥有接近 「老司机」 的行为,让 P5 在覆盖有高精地图的区域实现辅助驾驶,就算遇到没有高精地图的场景,小鹏依然会利用感知能力,通过 LCC-L 等降级功能保证驾驶员的安全。
「XNet」 是智能辅助驾驶的最终形态?
今年城市辅助驾驶验证开放后,小鹏从 2023 年起将开始推进多个场景无缝融合的全场景辅助驾驶,并在 2025 年往无人驾驶发展,通过 XNGP 这套辅助驾驶系统做到没有高精地图的支持下也适用各个城市与道路,覆盖停车场、城市、高速等场景,实现全程接近 0 接管,在安全、道路博弈、通行性等方面的体验,比老司机还靠谱。
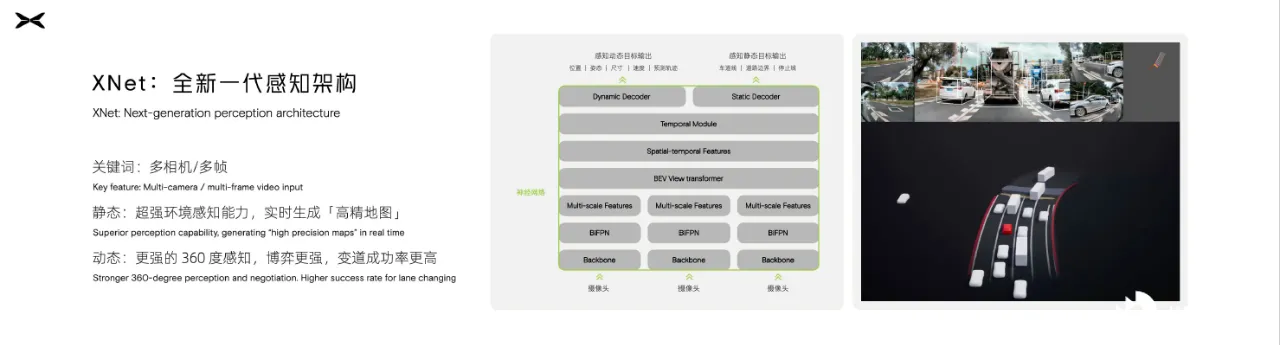
从功能上说,XNGP 有些遥不可及,但能够匹配适用的软硬件就能完成。基于小鹏 G9 搭载的高精度摄像头、前向两个激光雷达、 5 个毫米波雷达以及 508TOPS、包含两个英伟达 Orin 芯片计算平台,小鹏对感知架构进行了调整,采用了 XNet 新感知架构。

XNet 新感知架构的重点是:多相机 / 多帧,个人理解就是多视觉的融合,与此前的单相机单帧后融合相对应,两个摄像头之间,上下帧没有关联性。在 XNet 架构中,「幻灯片」 变成 「长视频」,会通过多个摄像头的画面在 BEV 中通过 Transformer (需要学习)进行融合,从而显示目标物在动态或静态等方面的信息。
Transformer 部署:动态 XNet 所需 122% Orin-X 算力,缩短至 9% 的算力可完成。
动态 XNet: 在视觉识别的基础上输出目标物的位置、姿态、尺寸、速度等信息,预测目标轨迹。
静态 XNet: 通过对车道线、道路边界、停止线等的识别,实时构建 「高精地图」,扩展系统的适用范围与稳定性。
值得一提的是,为了可以形成全闭环、自成长的 AI 与数据体系,小鹏开发了全自动标注系统,是传统标注系统销量的 45000 倍,曾经 2000 人一年的注册量,现在缩短至 16.7 天就能完成。为了应对一些比较罕见的用车场景,小鹏还利用 UE 引擎开发了仿真训练系统,当数据量不足以满足训练时,小鹏会通过 「定向仿真」 在虚拟世界建立大量类似场景,进行网络训练,然后通过各种模拟 Corner Case 验证后再进行推送。
全场景语音 2.0,24 小时待命
语音交互的意义在于解放了用户的双手。
两年前,小鹏汽车首创的 「全场景语音」 技惊四座,两年后,小鹏汽车又带来了全场景语音 2.0 系统,它将 MIMO 多音区技术应用在车载语音系统,实现多对一的人车语音对话,从而拥有 「全区全时」 的语音交互能力。

简而言之,全场景语音 2.0 可让小 P 24 小时待命,无需唤醒,每个座位命令都能同时识别且执行,做到精确处理四路音频、跨音区上下文对话、多人指令、多路语音反馈。
基于新语音交互架构,全场景语音 2.0 的反应也很迅速,唤醒到界面的反馈仅 245ms,到语音反馈小于 700ms,发送指令到执行,延迟在 1S 以内,具备边听、边想、边做、边答的功能,甚至一句话只需要 4 个命令就能执行。
遇到无网或断网的情况下,全场景语音 2.0 支持 600 多项功能,满足日常用车需求。
智能机器人【小白龙】And 新一代(第六代)飞行汽车
除了汽车外,小鹏的机器马与飞行汽车也是这次的重头戏。
小鹏认为,智能机器人是开启智能时代的标志性产品,不同于智能汽车,智能是直接进入 「无人驾驶」 阶段的新产物。相较上一代的机器马,现款机器在头部可以进化为 AR 投影,也能搭载高保真音响系统,在它的 「关节」 部位,还加入了柔性织物关节、液体硅胶表皮、EVA 超临界发泡足底、轻量化骨骼等应用,大幅增加机器人与物理环境交互的潜力。

可以推断,小鹏鹏行智能机器人也是基于小鹏汽车的体系化能力,运用了很多智能汽车的概念,比如动力系统、自动驾驶、人机交互、AI 能力等,从而实现量产。
此外,小鹏还向我们展示了一辆采用分体结构的飞行汽车。
比起去年的概念车型,新一代(第六代)飞行汽车搭载了机臂折叠收纳系统,实行陆行、飞行不同场景自由切换,车身材料采用了碳纤维单体壳车体,大量使用了航空铝材、镁合金与特殊玻璃,采用了高能量密度、高放电倍率动力电池。


据小鹏汽车董事长、CEO 何小鹏介绍,基于小鹏汇天自研汽车飞行驾驶操控系统,在陆行状态下,驾驶模式与汽车一致;在飞行状态下,则通过方向盘与档杆的配合实行飞行的目的。在法规、环境允许的条件下,飞行汽车能够垂直起降、跨越拥堵、障碍、河流等,满足人们短时间低空出行的需求。
当然了,通过小鹏飞行汽车的已完成试验车的首飞情况来看,这款飞行车的整体形态有待完善,想要真正实现 「陆空一体」 还有层层阻碍。
电动势有话说:
本次科技日发布会的智能辅助驾驶的最终形态 ——XNGP 与全场景语音 2.0 是小鹏一年来的努力,这也是它的分内之事,至于智能机器人【小白龙】与新一代(第六代)飞行汽车则是小鹏汽车在科技领域不断探索的新产物。
正因如此,也有网友 「建议」 小鹏应该踏踏实实造车。尽管现在有很多汽车企业也从事了飞行汽车的研究,也有跻身在四足仿生机器人的车企,但终究没有掀起多大的浪花,毕竟产品的终端是客户,让每一个 「天马行空」 的技术逐渐落地最终量产才是车企最后的出路。
其实对于汽车企业来说,新技术 「攻坚克难」 无疑是进一步赋予汽车制造业务,迫使车企加速升级转型。不难发现近几年的智能汽车与其他产业不断的在融合,而小鹏汽车的诞生本身就与科技脱不开关系,况且何小鹏还是互联网行业出生的,至少在这方面比我们看的更清楚。
多年来,小鹏汽车一直执着于智能辅助驾驶,直到第四届小鹏汽车科技日,小鹏的目光已经从自动驾驶逐渐转向无人驾驶,这也证明了智能驾驶一直都是小鹏自研的主题。
而身处在 「万物互联」 的时代,软硬结合、电动化、生态化、智能化、新事物、新玩法已经成为老生常谈的一个话题。而智能机器人、飞行汽车的出现,则代表了小鹏对未来技术的展望。

















