
不是郑小康
关注
特斯拉
Autopilot
2022-05-19


FSD Beta 10.12 发布,加入开门识别的可视化了,这个 SUV 模型看着像理想 L9 hhh 对其他车辆的行驶路径预测也可视化了。
具体更新日志:基于 25 万个真实世界视频片段的训练数据和新的矢量车辆资产
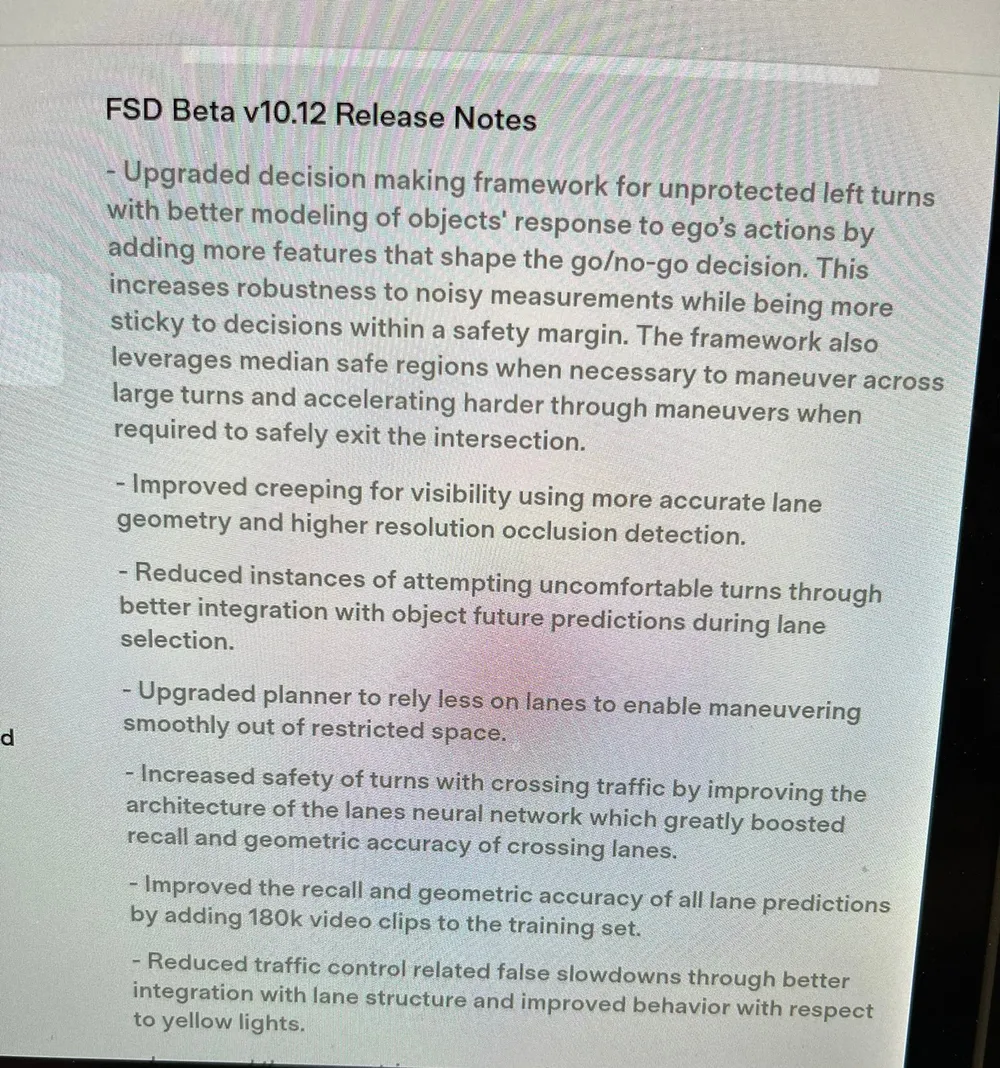
- 升级了无保护左转的决策框架,通过添加更多塑造 走/不走 决策的特征,更好地建模对象对自我行为的反应。这增加了对噪声测量的鲁棒性,同时在安全范围内对决策更具粘性。该框架还可以在必要时利用中间安全区域以在大转弯处进行机动,并在需要安全退出交叉路口时通过机动加速。
- 使用更准确的车道几何形状和更高分辨率的遮挡检测来改进蠕行以提高能见度。
- 通过在车道选择过程中与目标未来预测更好地整合,减少尝试不舒服转弯的情况。
- 升级后的规划器减少了对车道的依赖,从而能够在受限空间外顺利进行机动。
- 通过改进车道神经网络的架构来提高交叉路口的转弯安全性,这极大地提高了交叉车道的召回率和几何精度。
- 通过将 18 万个视频片段添加到训练集中,提高了所有车道预测的召回率和几何精度。
- 通过更好地与车道结构整合并改善黄灯行为,减少交通管制相关的错误减速。
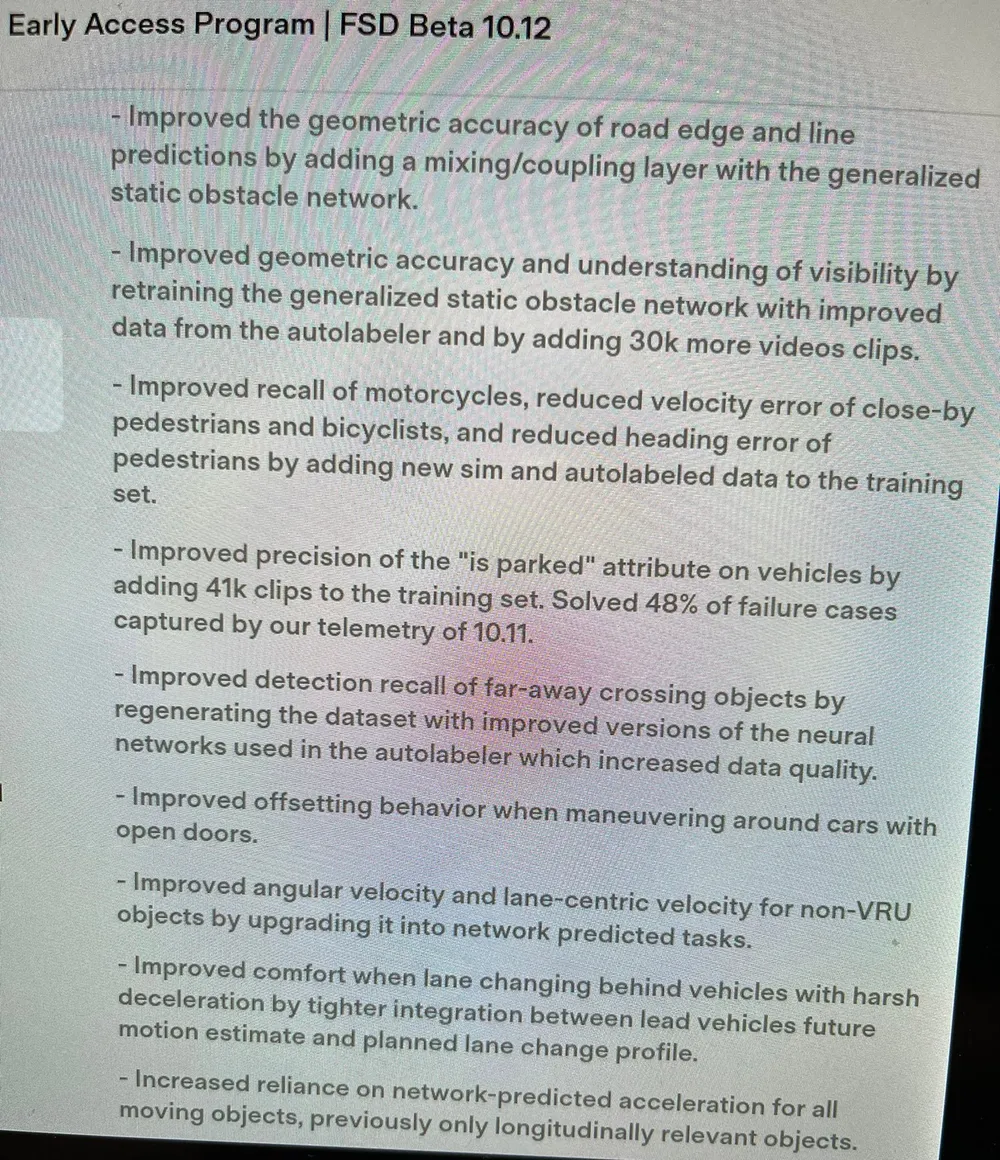
- 通过在广义静态障碍物网络中添加混合/耦合层,提高了道路边缘和线路预测的几何精度。
- 通过使用来自自动标注器的改进数据重新训练广义静态障碍物网络并添加 3 万 个视频片段,提高了几何精度和对可见性的理解。
- 通过向训练集中添加新的模拟和自动标注数据,提高了摩托车的召回率,减少了附近行人和骑自行车的人的速度误差,并减少了行人的航向误差。
- 通过向训练集中添加 4.1 万个片段,提高了车辆「停放」属性的精度。解决了 10.11 遥测捕获的 48% 的故障案例。
- 通过使用自动标注器中使用的改进版本的神经网络重新生成数据集,从而提高了对远处交叉物体的检测召回率,从而提高了数据质量。
- 在打开车门的汽车周围进行机动时改进了偏移行为。
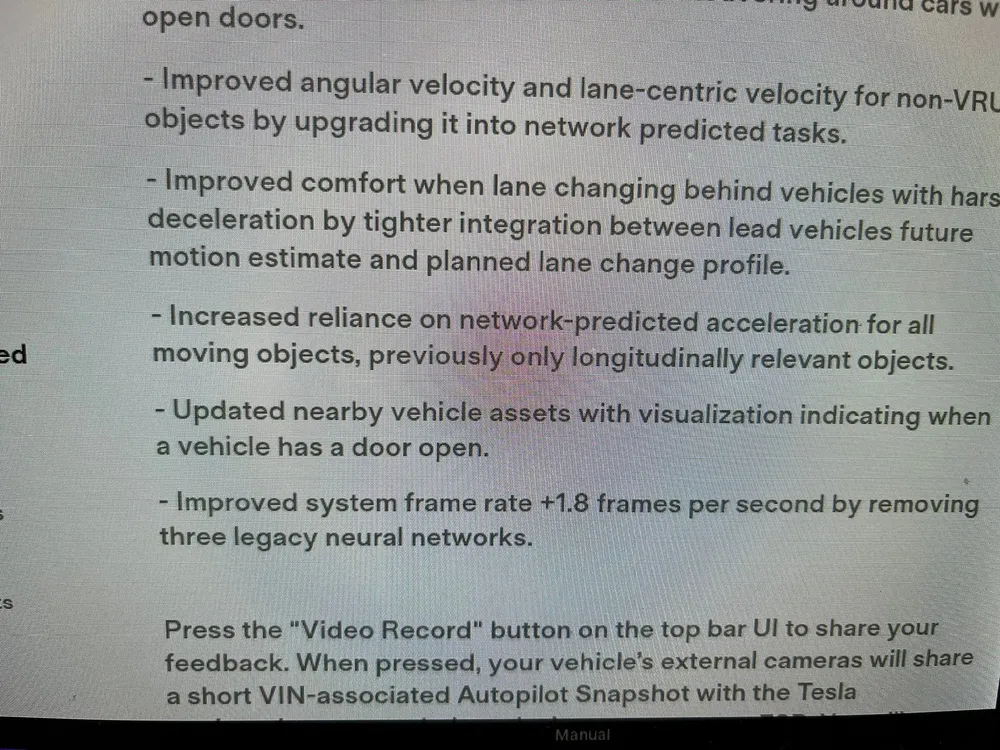
- 通过将其升级为网络预测任务,改进了非 VRU 对象的角速度和以车道为中心的速度。
- 通过在引导车辆未来运动估计和计划的车道变换曲线之间更紧密地集成,提高了在具有急减速的车辆后面变换车道时的舒适度。
- 增加了对所有移动物体的网络预测加速度的依赖,以前只有纵向相关的物体。
- 更新了附近的车辆资产,可视化指示车辆何时打开车门。
- 通过移除三个传统神经网络,提高了每秒 1.8 帧的系统帧速率。
特斯拉
Autopilot
2022-05-19
评论 · 0
0/3
大胆发表你的想法~
相关推荐
不是郑小康
23
评论
不是郑小康
6
评论
不是郑小康
4
评论
不是郑小康
2
评论

ABaZY
2
1

摩顿在泰山开道奇
1
1

Julien Grand Poisson
蔚来 ES6 圈主

赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
更多



