作者:朱玉龙
参加亮道智能的产品沟通会,聊了不少他们的新产品的信息,在整个激光雷达赛道竞争很激烈的格局下,亮道推了一个很有意思的方向。它的特点可以简述为,在现有的感知体系下,通过激光雷达的特性来弥补感知的不足,来提高城市道路 City Pilot 的感知特性。而且这个侧向激光雷达版本主要关注就是城市道路上各种低矮和奇怪的物体,能够解决很多特殊的问题。传统整车企业,还是围绕自动驾驶辅助不同分组功能来做的,在 L3 功能没有突破之前,通过更优性价比的激光雷达产品来提升多种自动驾驶辅助功能的安全与体验,可能是激光雷达快速上车的最优的发展路径。
激光雷达如果参考毫米波雷达的布置方式,主要在侧后方变道场景和泊车场景最为有用。

低矮物体的识别
目前在 L3 还没上的过程中,新势力在当前激光雷达配置,主要考虑是解决感知漏洞问题。
目前主要的主流意见是把激光雷达安装在车顶正前方,例如理想 L9、蔚来 ET7。其实现的功能为前方碰撞预警、自动紧急制动、自适应巡航以及作为高阶自动驾驶功能的目标探测传感器。装车顶的时候会考虑 FOV 下边缘跟车顶盖的位置,所以根据车型的不同一般会有下倾几度的适配。安装的位置越高,对于激光雷达的视野会更好(可越过前车检测到更前面的车),并且车顶位置较高,在行驶过程中不易被沙石喷溅,且不易受到碰撞危险。考虑硬件成本、防污和碰撞维修成本等方面优势明显,而且我们看到配合摄像头使用。

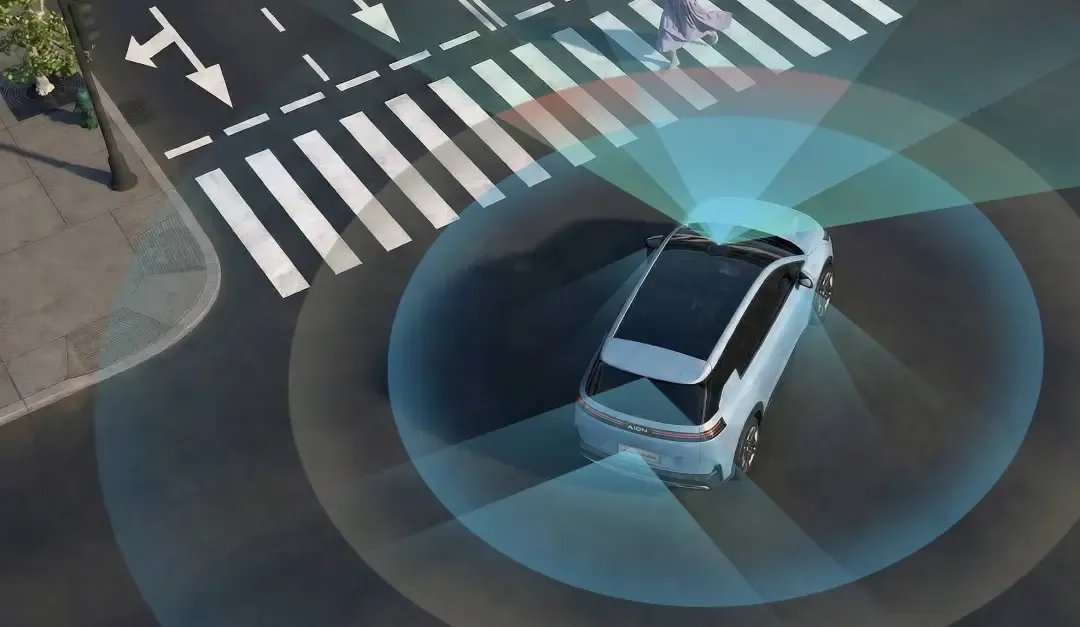
在城区道路行驶,行人、两轮车和穿梭变道的车辆混流,通行场景复杂多变,对于城区智能驾驶提出了更高挑战。在安装于车顶的前向长距激光雷达,主要考虑覆盖的范围,但是在探测时,如果要考虑城市路况,人车接触比较近的时候,是存在较大范围的近场盲区,特别是考虑中国的特殊的物体检测;在道路上高度 30-50cm 的宠物猫和宠物狗,在你停车的时候往你的死角跑,在你右转的时候是特别难受的。

因此通过侧边的配置,垂直视场角不低于 75° 的侧向激光雷达可以与前向激光雷达的近场盲区进行点云互补,能够实现低矮物体比如马路边沿、减速带等目标物,以及相邻车道线的探测。通常马路边沿高度 10cm,可实现 0.35m-15m 的近场探测,还能够在 0.35m 处达到 30 行点云的超高分辨率的探测效果。
这里对于侧向补盲的激光雷达的垂直视场角提出了更高的要求,看目前上车的一些激光雷达布设方案,安装在侧向的激光雷达垂直 FOV 还是在 25°,亮道的这款产品主打的就是超过 75° 的垂直视场角,是差异化的一个产品定位。
感知盲区的大小由几个因素构成,激光雷达的安装高度(Height1),前引擎盖的高度(Height2),激光雷达所能调整的向下倾斜俯仰角②。受限于 LiDAR 的俯仰角的大小限制,②的数值无法任意变大,不然会影响前方探测的距离。

多颗激光雷达的配置
如上所说的,当一颗激光雷达没办法让 City Pilot 的感知死角被满足,那就只能加钱,选择多颗激光雷达的组合配置方案。目前多激光雷达方案之一是放置在前方左中右,将三颗激光雷达安放在车前方的保险杠和车前格栅处,应用于前方碰撞预警、自动紧急制动和自适应巡航功能。组合后的水平 FOV 会更大,对于头顶式一颗激光雷达无法覆盖的十字路口场景盲区也能进行有效探测。把激光雷达配置在前方位置在外观设计和散热方面的难度会低很多。但因其位置偏低,存在着容易受到地面沙石、水的飞溅和污染,甚至破坏的风险。一旦发生碰撞和损坏,更换成本会很高(激光雷达数量越多,硬件成本也会越高)。

激光雷达还可以像小鹏 P5 安装方式是在前方左右两侧,两颗激光雷达装于前侧左右保险杠处,还需要注意两边激光雷达的角度布置,解决近距离盲区和十字路口 AEB 工况的问题。激光雷达的安装位置需要考虑到以下几个方面:
-
外观:牛角确实不太好看
-
散热
-
碰撞保护
-
表面防污
-
设备干涉
-
尽可能小的盲区
-
成本
从我们来看,一款好的产品需要考虑车身 ID 设计、车身外观和功能定义,并兼顾激光雷达的位置选定。而激光雷达的布设方案设计的出发点,应该是是否满足功能场景的需求与工程落地之间的平衡点。

小结:随着激光雷达的成本下降和用量快速上扬,这一波感知方向传感器的探索还是确定在快速增长的。