

作者: The Office
6 月 8 日,成立 462 天的新造车公司集度终于迎来了首个产品发布会。不过可惜的是,鉴于发布会的流程和形式 —— 在百度元宇宙 App 希壤上召开,太多的注意力被元宇宙、百度 AI 数字人希加加等元素吸引,而忽略了对产品本身的关注。

开门见山,我们还是更愿意专注在当晚亮相的集度概念车 ROBO – 01 上。因为我们始终相信,在汽车行业的新玩家层出不穷的时代,每一个新造车公司都免不了面临一个哲学拷问:
这个世界还需要一个新的汽车品牌吗?
而对于这个问题的答案,任何管理层的说辞都不如实际的产品来得有说服力。所以,少废话,上产品。

在去年的百度 AI 开发者大会上,集度董事长李彦宏提到过 ROBO – 01 会贯穿 「自由移动」、「自然交流」和「自我成长」 三大产品理念。
与之对应,我们不防就从智能驾驶、人车交互和智能座舱这三个维度,来看看这台 ROBO - 01。
翻译翻译,什么叫做冗余?
在 ROBO Day 召开之前,我已经对集度 ROBO – 01 的智能驾驶技术有着很高的预期。这在很大程度上是因为,集度汽车成立的重要因素之一,就是承载百度 Apollo 智能汽车相关技术的工程化落地。
集度和百度没有让我们失望。最终,ROBO – 01 拿出了中国首个真・冗余智能驾驶系统。「真冗余」的概念由全球知名的智能驾驶巨头 Mobileye 首次提出,区别于特斯拉引领的「纯视觉」路线、主流的「多传感器融合」路线,「真冗余」可以说是目前智能驾驶领域技术难度最高的技术路线。
集度没有在昨天的 ROBO Day 上就真冗余做进一步解释。不过,基于 Mobileye 的真冗余,我个人的猜测是,集度很可能构建了完全独立的两个自动驾驶技术栈,其中一个为纯视觉,自动驾驶的感知、定位、规控… 所有模块全部由摄像头驱动;另一个为「激光雷达和毫米波雷达融合」驱动。「真冗余」系统,意味着将上述 2 套系统集成到同一款车上,实现完全独立的 2 套自动驾驶系统真正的互为冗余 —— 而不是不同传感器承担不同感知任务的互补关系。
Mobileye 曾经做过一个示意图,来体现主流的「多传感器融合」和「真冗余」路线的根本差异。回到 ROBO – 01,这意味着这款车可以在不升起前舱盖上的两款激光雷达的前提下,实现高阶智能驾驶技术。
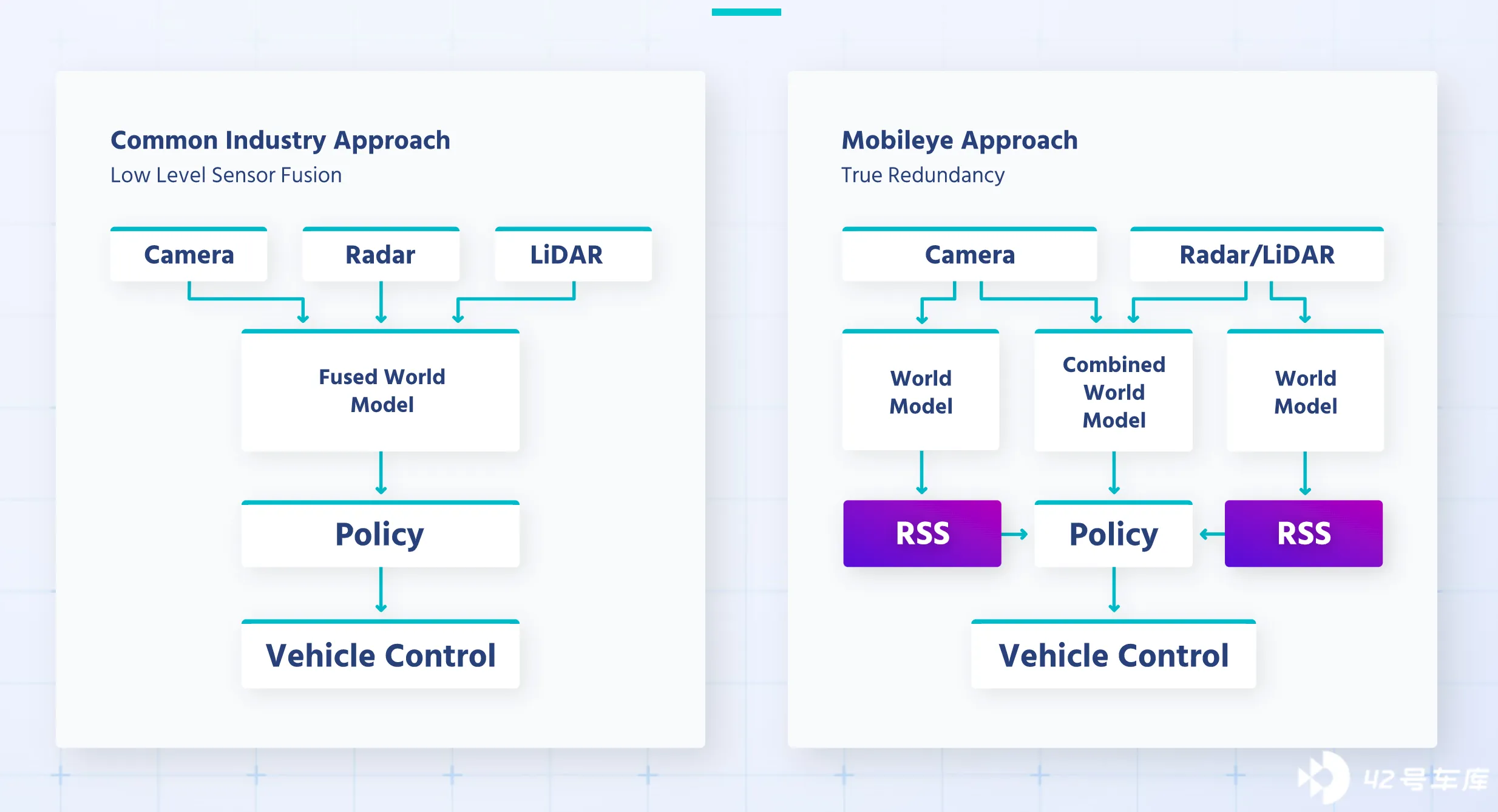
显而易见,在主流的「多传感器融合」还远未成熟,「纯视觉」路线特斯拉已经一骑绝尘、遥遥领先的背景下,挑战「真冗余」是一个需要巨大勇气的选择。
但 Mobileye,当然也包括今天的集度,认为「真冗余」的巨大吸引力在于,当我们基于「多传感器融合」—— 本质上是互补,而非冗余路线去做智能驾驶时,要将安全运行的场景提高到 99.999999%,意味着数亿小时的系统安全运行验证。
而「真冗余」互为备份的本质意味着,新的运行验证 = 纯视觉 × 纯「激光雷达和毫米波雷达融合」,这可以将系统安全运行的验证时长大幅降低到数万小时。
坦率地讲,当我看到 ROBO – 01 选择了「真冗余」路线的时候,我的期待又加一层,因为这意味着,百度 100% 会将过去近十年来在智能驾驶领域的算法、数据和工程化经验和盘托出。从最早 2013 年百度深度学习研究院成立,设立自动驾驶实验室,到如今百度 Apollo 迭代发展的工程积淀。
在具体的硬件方面,ROBO – 01 基于双英伟达 Orin-X 平台,搭配 2 颗禾赛 AT 128 激光雷达、5 颗毫米波雷达和 12 个摄像头,完成对全车的感知覆盖。整体而言硬件层面没有意外,但也没有惊喜,是 2023 年的一线水平。
百度 Apollo 会赌上全部家当的另一个体现是,根据昨晚发布会的说法,在 2023 年下半年 ROBO – 01 量产版交付阶段,将前装具备点对点智能驾驶能力的软件系统,开箱即用。
尽管距离交付还有一年左右的时间,但这无疑是开启高阶智能驾驶行业先河的一个 Flag,我真是太想看看集度的真功夫了。
更进阶的智能化架构
下面来聊聊 ROBO – 01 的智能座舱,在集度,或者说这个行业搞定「完全无人驾驶」之前,智能座舱对驾驶员和乘车人的用车体验有根本影响。
ROBO – 01 搭载了一块贯穿屏 —— 而非目前主流的 2 或 3 块屏幕拼接集成的三联屏,简单理解,将屏与屏之间的边框干掉,直接做一块一体化的超宽屏幕。如果非要找有一定相似的产品,也许几年前拜腾汽车发布的 M-byte 是个不错的参考。

但 ROBO – 01 与 M-byte 的相似到此为止,为了驱动这块大屏,ROBO – 01 中国首发搭载了高通骁龙 8295 芯片,芯片制程提升至 5 nm,用于 AI 学习的 NPU 算力达到了 30 Tops。作为对比,iPhone 13 搭载的 A15 芯片,NPU 算力为 15.8 Tops。
根据集度披露的规划,ROBO – 01 将基于这样的硬件基础推行 3D 人机共驾地图,让 ROBO – 01 跑在三维地图上。从集度发布的视频来看,智能驾驶系统感知到的障碍物模型支持直接可视化融合显示在 3D 地图上,实现这一高级别融合的 UI 效果有赖于智能座舱和智能驾驶系统的跨域资源调度,集度研发 JET 智能化架构,这涵盖了电子电气架构与 SOA 操作系统,它可以保证不同域之间高效的信息和资源调度。

根据集度的说法,JET 可以实现算力共享、感知共享、服务共享。这意味着 ROBO – 01 的智能驾驶系统失效的极端场景下,智能座舱的算力可以继续提供支持,保证系统级的安全冗余。这毫无疑问是更进阶的智能化架构设计。

在智能语音方面,ROBO – 01 支持毫秒级的响应,可以实现车内外的全场景覆盖,通过百度 AI 积淀的视觉感知、声纹识别和唇语捕捉等多模态融合的「类人」交互能力,集度试图打造一种自我成长的智能座舱体系。
我们也期待在今年秋季的量产版车型上实际体验 ROBO – 01 的座舱表现。
定义一个新的交互有多难?
ROBO – 01 的概念版,没有门把手、换挡杆、左右拨杆等物理控键,考虑到集度官方宣称,秋季发布的量产版将保持与概念车 90% 的相似度,且 ROBO – 01 确实拿出对应的解决方案来定义新的交互,我们这里先按照量产车保留上述设定的前提来讨论问题。
不是隐藏式门把手,而是完全去掉门把手,按照集度的说法,是在车外布局麦克风,再通过蓝牙或是 UWB 短途通信来提前让语音待机,语音解锁车门。
再比如没有换挡杆,集度没有给出细节的介绍,但一种可能性是基于前文提到的声纹识别和语音识别,由驾驶员语音操控换挡,或是特斯拉新 Model S/X 提供的交互:滑动中控屏上的换挡条完成换挡,扶手箱位置提供实体按键作为紧急备份。

在谈到取消这些物理控键的部分,集度的官方通稿中提了一个词叫做「删繁就简」。人车交互的发展史确实是一部删繁就简的发展史,从手动到自动,从机械手刹到电子手刹,从「实体启动键」到「刹车踏板上电」,驾驶一辆汽车的交互正在变得越来越简单。
然而,交互又是汽车产品研发中阻力最大、最难推动的部分。新的交互必须同时在兼顾更安全、更简单和更高效的基础上,保证较低的学习成本,简单的说,好上手。
鉴于汽车作为交通工具的属性,交互的革新总是在缓慢的发生。此外,监管方也出台了大量严苛的法律法规来对企业进行约束。比如,ROBO – 01 上的线控转向和可升降的激光雷达,都需要与监管方进行密切的沟通,确保审批的通过。但至少在今天,它们基本不具备在现行法律法规下量产的可能性。

但集度在切实推进相关领域的工作,比如在 2021 年 12 月 1 日,集度和蔚来、吉利一道,成为线控转向技术发展与标准化研究联合单位,推进相关领域的研究。
坦率地讲,很难在今天谈论集度这些交互,甚至是这些交互背后的努力能否成功,但这些重新定义交互的努力表明,集度希望和试图给汽车行业带来一些技术、产品之外的新鲜血液,这一点毫无疑问是值得关注的。
从时间上看,到今天集度成立不过 463 天。正如前文所说,今年秋季的 ROBO – 01 量产版,将保留 90% 的概念车的相似度,那么相比于蝶翼门、对开门等结构创新,我更期待集度在智能驾驶、座舱和交互方面的创新。
换句话说,期待一个名副其实可以「自由移动」、「自然交流」和「自我成长」的集度 ROBO – 01。



















