
不是郑小康
关注
环形隧道
2023-06-27
重温特斯拉 Autopilot 视觉负责人 Phil Duan 的演讲。
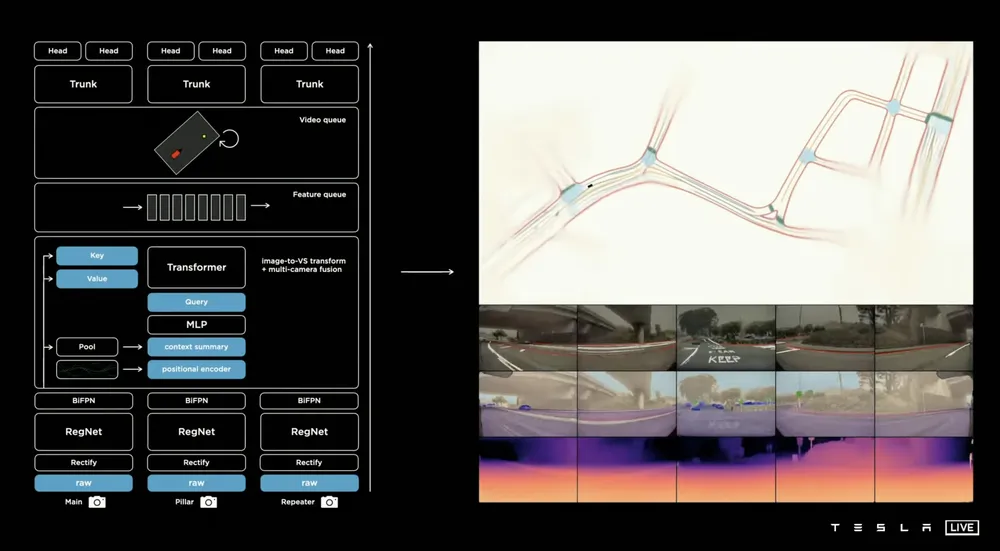
- 图一是 Andrej Karpathy 在 AI Day 2021 的 BEV 感知架构。
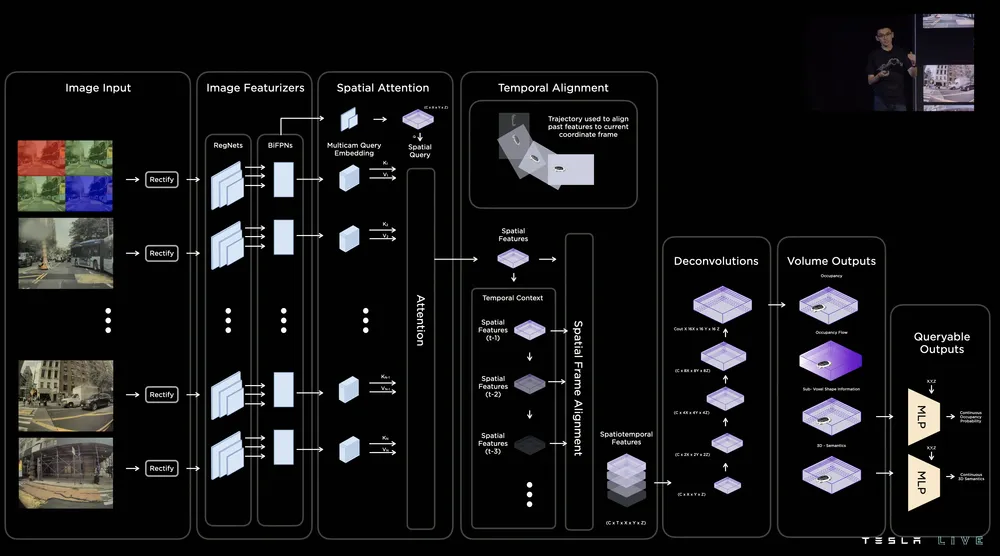
- 图二是 Phil 在 AI Day 2022 的占用网络,用于通用障碍物检测。
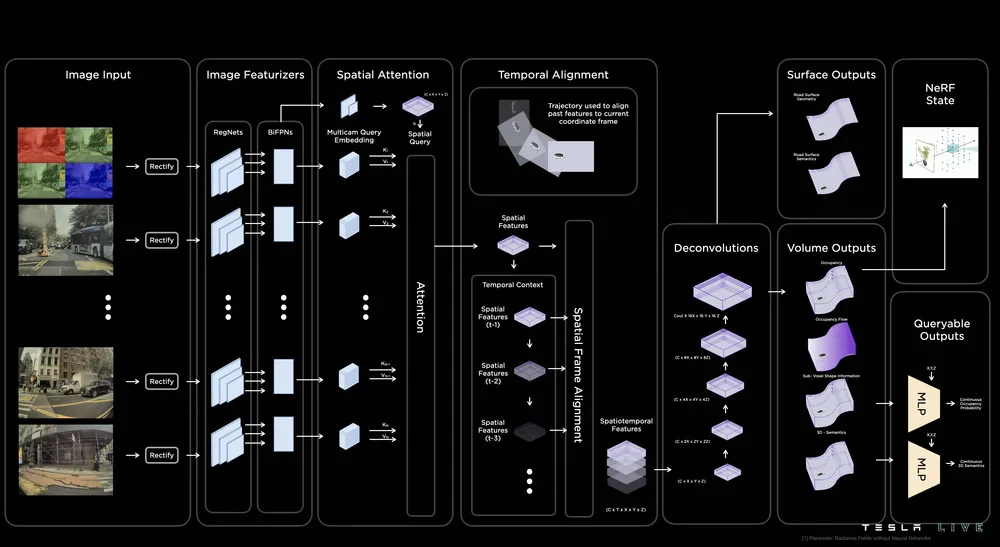
- 图三是 3D 重建的 Nerf,用于仿真和自动标注。
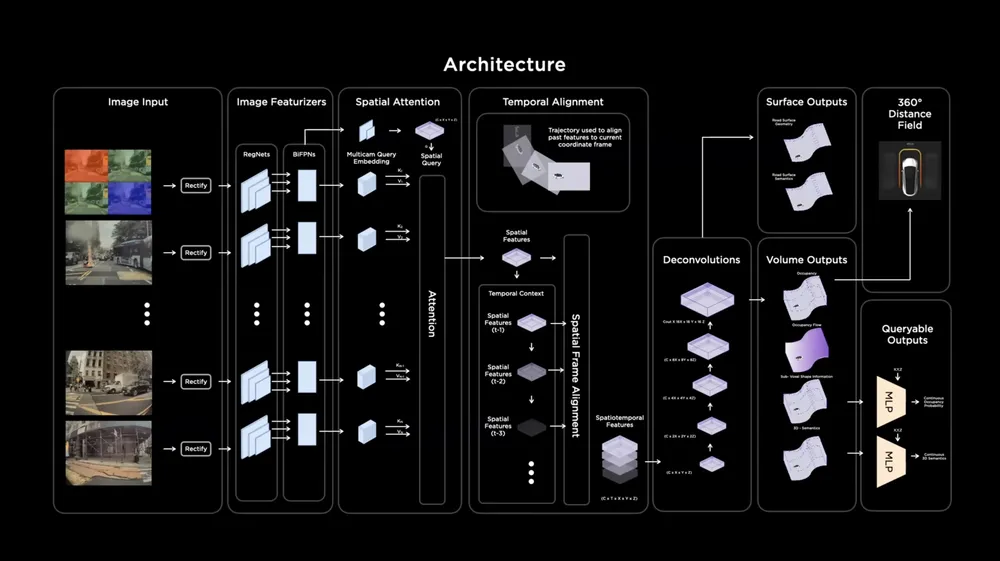
- 图四是近距离占用网咯,用于取代超声波传感器做近距离障碍物感知。
除此之外,根据 Ashok 的说法,FSD 还有一些复杂路口车道和路标拓扑关系,包括车道和交通灯的连接和自动标注,也都是这个架构,但是没有专门的 PPT 了。
大家可以对比下,从架构上来讲,8 颗摄像头图像进来,矫正层 - 特征提取 - 基于 Transformer 做空间注意力融合 - 时序融合,接下来占用预测输出、道路曲面参数、语义输出、MLP 获得更高分辨率的局部输出。
一个 BEV 模型作为基础架构,衍生做出了各种各样的任务。大约两年前特斯拉就是这个模型了。
体会到了@Patrick-llgc 说的 BEV 的上限很高,可以做很多的事情。
环形隧道
2023-06-27
评论 · 0
0/3
大胆发表你的想法~
相关推荐
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
14
评论
不是郑小康
10
评论
不是郑小康
16
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
不是郑小康
赞
评论
更多



