作者:陶烟烟
NOA (Navigation on Autopilot) 作为高阶自动驾驶的核心功能,涵盖高速智慧导航辅助驾驶、记忆行车/通勤模式及城区智慧导航辅助驾驶三大类。
其实现依赖复杂的系统架构与多模块协同,我们从工程视角出发,基于 ISO 22737 等国际标准,深入剖析 NOA 的功能模块,包括设计运行范围 (ODD) 、危险工况识别、最小风险策略 (MRM) 、紧急停车及通勤模式设计等,并探讨其状态机设计与转换逻辑。
通过对系统架构与开发任务的系统性分析,揭示 NOA 在技术实现上的关键挑战与解决方案,NOA 技术正处于快速发展阶段,其落地需平衡功能性、安全性与用户体验。
NOA 功能模块解析:从架构到核心技术
NOA 作为高阶自动驾驶功能,系统架构需整合多个子模块以实现路径规划、环境感知与动态驾驶任务 (DDT) 的无缝执行。
根据 ISO 22737 的参考框架,一个完整的自动驾驶系统包括路径规划、感知识别、ODD 监测、动态驾驶任务、危险工况识别、最小风险策略、紧急停车、控制执行、驾驶员监控、数据存储及 V2X 通信等子模块。
● 模块相互协作,确保系统在复杂场景下的安全性和可靠性。
◎ 感知识别模块通过激光雷达、摄像头和毫米波雷达提供环境数据,
◎ 路径规划模块则基于高精地图生成行驶轨迹,
◎ 而控制执行模块将规划转化为车辆的实际动作。

备注:现在整个架构被端到端和 VLA 开始取代,我们会从整个系统出发,去讨论过去和现在,还有未来的变化。
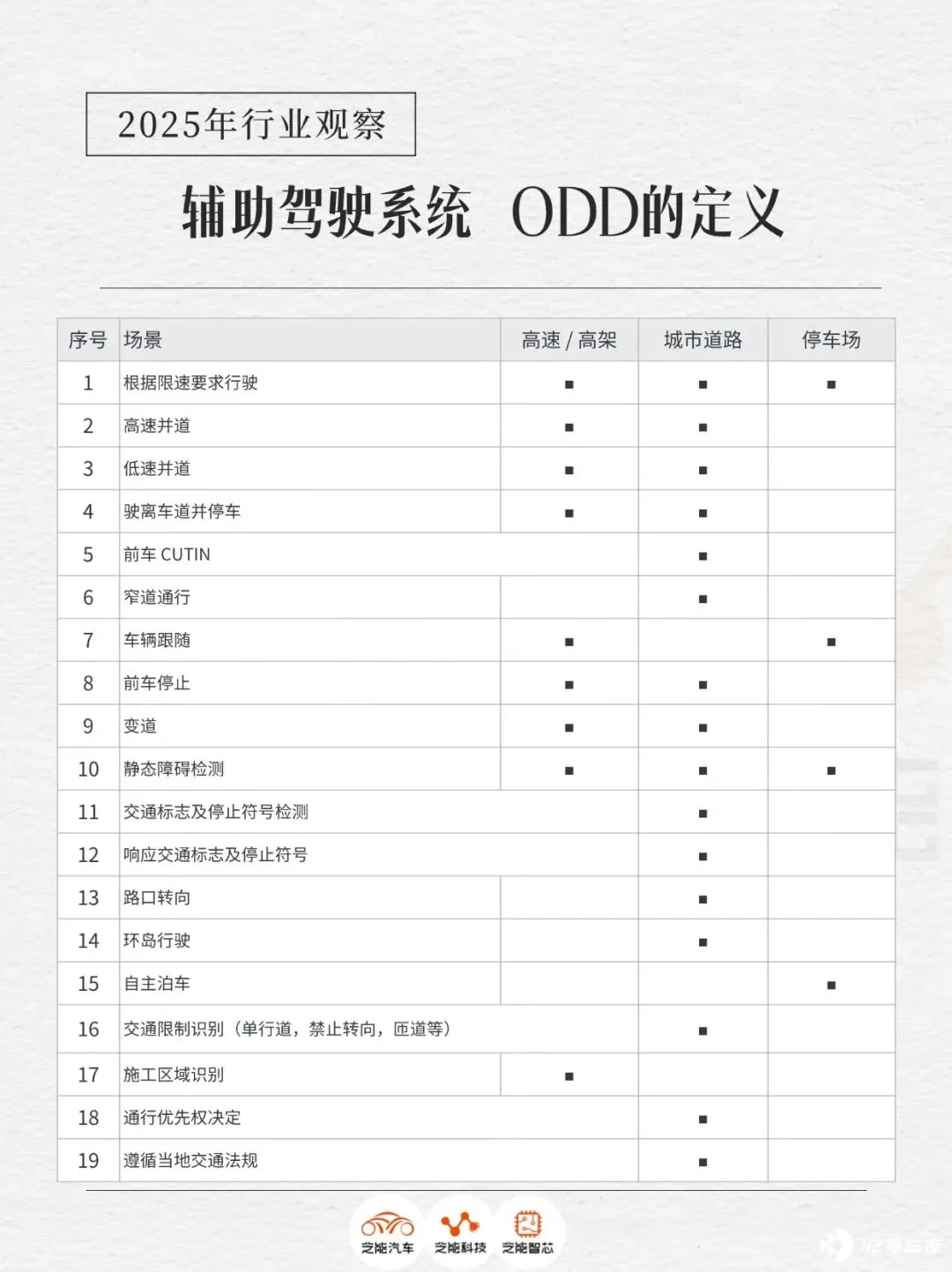
ODD 是 NOA 功能设计的基石,明确系统适用的运行条件是确保安全的前提。
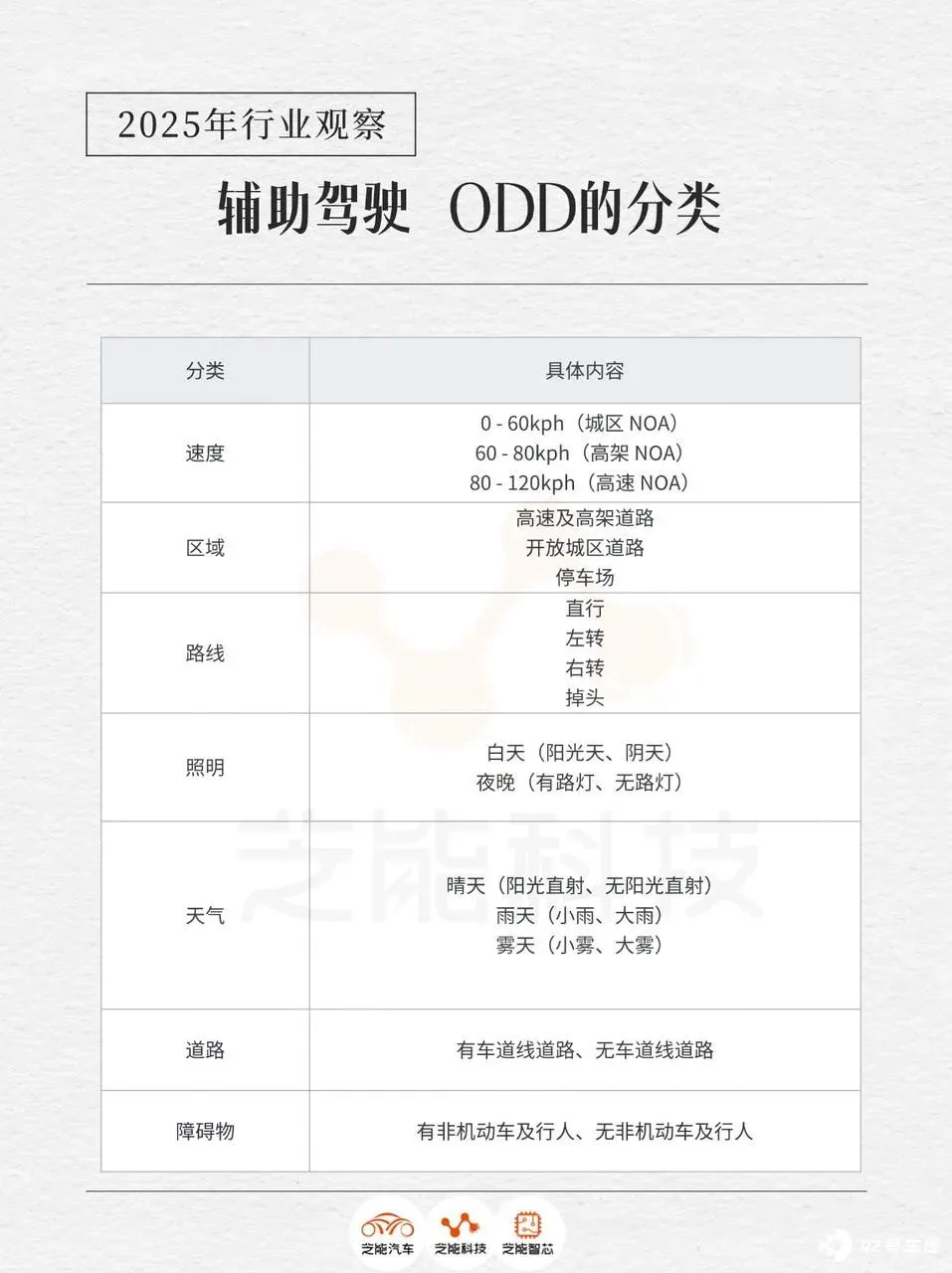
● ODD 需涵盖以下关键元素:
◎ 速度 :如晴天限速 80km/h,雨天降至 60km/h,颠簸路面进一步限制至 40km/h。
◎ 区域 :支持高速公路、城市主干道,但可能排除非铺装道路或狭窄巷道。
◎ 路线 :预定义导航路径,如通勤模式下的固定上下班路线。
◎ 照明 :支持 100-10,000 lux 范围,覆盖白天至夜间人工照明场景。
◎ 天气 :适配晴天、小雨、中雨,暴雨或大雾可能超出 ODD。
◎ 道路 :要求清晰车道线、铺装路面,无严重沉陷或积水。
◎ 障碍物 :识别行人、骑行者及静态物体,如路障或停车车辆。
系统需实时监测 ODD 状态,判断是否处于设计范围内,当传感器检测到能见度因大雾降至 ODD 阈值以下时,系统应触发退出机制。这种动态监测依赖高精度传感器与实时数据处理,工程实现上需优化算法以降低误判率。
● NOA 系统需实时识别危险工况并采取规避措施。危险工况分为无遮挡和有遮挡两类:
◎ 无遮挡工况 :如行人横穿马路或骑行者并行,系统需通过目标检测算法识别并预测其运动轨迹,结合刹车或变道规避。
◎ 有遮挡工况 :如行人从车辆后方突然出现,要求系统利用多传感器融合 (如激光雷达与摄像头) 增强感知能力。
ISO 22737 规定系统必须应对这些场景,工程实现上需设计鲁棒的感知模型,确保在遮挡或低光照条件下的识别精度。此外,系统需向外部发出警告 (如鸣笛或灯光闪烁) ,这对 V2X 通信的实时性提出更高要求。
● 当 NOA 系统无法继续执行 DDT 时,MRM 被触发以将车辆置于最小风险状态(MRC)。触发条件包括:
◎ 遇到无法处理的危险工况 (如多车混杂的复杂路口) 。
◎ 系统故障 (如传感器失效) 。
◎ V2X 通信中断。
◎ 即将超出 ODD (如进入未铺装道路) 。
MRM 执行过程可能包括减速、在车道内停车或变道至路边停车,在高速公路上检测到前方事故,系统可减速并靠边停车,同时激活危险灯。工程设计需确保 MRM 的平滑性,避免二次风险,如突然刹车导致后车追尾。
● 紧急停车功能为用户或调度员提供主动干预手段。触发场景包括:
◎ 乘客身体不适 (如晕车) 。
◎ 系统异常 (如路径偏离) 。
◎ 车辆失去自动驾驶能力 (如硬件故障) 。
实现上,紧急停车按钮需集成至车内显眼位置,触发后系统立即执行减速并停止,伴随外部警告信号。重新激活需驾驶员确认,确保系统完整性。此功能对人机交互设计提出要求,需兼顾便捷性与误触防范。
● 通勤模式是 NOA 的创新亮点,通过记忆轨迹优化日常驾驶,核心技术包括:
◎ 记忆轨迹录制 :记录全局坐标下的经纬度点串,包含自车动作 (如转向、刹车) 及环境信息 (如车道线位置) 。
◎ 全局到局部转换 :将录制轨迹与实时感知数据对齐,生成局部导航路径。例如,利用 SLAM (同步定位与建图) 技术校准偏差。
◎ 轨迹追踪 :基于局部路径,结合感知到的车道线和障碍物,执行精确控制。
工程实现上,可采用传统规则或 AI 模型生成导航轨迹,挑战在于如何处理动态环境变化,如道路施工或临时障碍,需结合实时感知动态调整轨迹。
NOA 状态机设计:逻辑与实现
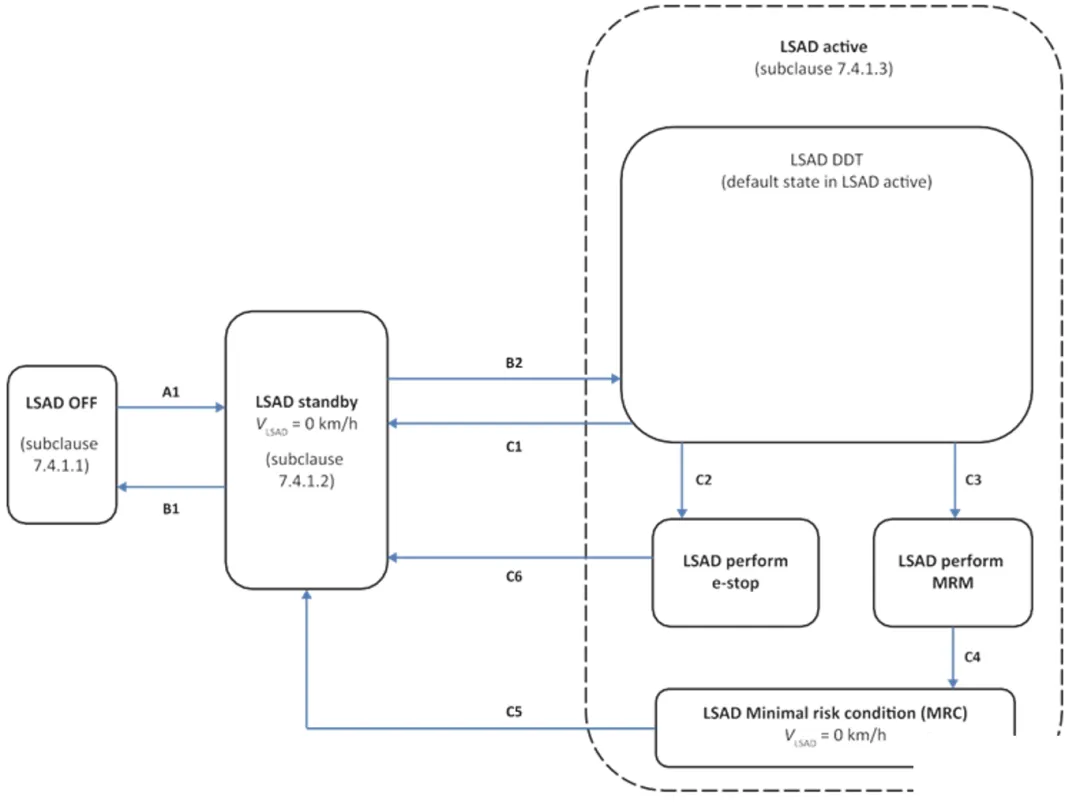
● NOA 的状态机设计依据 ISO 22737 标准,包含 OFF、Standby 和 Active 三大状态及若干子状态,旨在清晰定义各阶段系统行为且避免功能重叠。
◎ OFF 状态下系统未激活,适用于车辆熄火或待机;
◎ Standby 状态下系统处于待命,准备激活,包括验证操作设计域 (ODD) 、建立通信并保持静止;
◎ Active 状态执行动态驾驶任务 (DDT) ,进一步分为默认的 DDT 子状态、紧急停车 e-stop 子状态、最小风险策略 MRM 子状态和最小风险 MRC 子状态。
状态转换逻辑是系统运行的核心,条件涵盖从上电自检通过后的 A1 (OFF 到 Standby) 到驾驶员确认解除紧急状态后的 C6 (e-stop 到 Standby) 。
此外,工程实现面临实时性、鲁棒性和用户体验的挑战,要求状态转换迅速准确、适应传感器噪声或通信中断,并确保平滑的状态切换与及时的用户反馈。
为此,采用有限状态机框架结合实时操作系统,以及高性能计算平台来支持复杂的感知与决策算法显得尤为重要。整个设计需保证在各种条件下安全有效地完成状态间的转换,以提升自动驾驶系统的可靠性与用户体验。
小结
NOA 是自主驾驶的开端,从 ODD 定义到危险工况识别,再到 MRM 与通勤模式的创新,NOA 系统需在感知、决策与控制层面实现精准协同,工程实践仍面临诸多挑战。