2020 年自动驾驶有些技术被淘汰,有些技术冒出来,还有些万年长青。2020 年我重新梳理了下自动驾驶的关键技术,并尽可能用通俗的语言解释高深的技术问题。
自动驾驶系统本质上和屏幕前的你没有区别,开发自动驾驶技术实际上就是造一个「人工老司机」的过程。
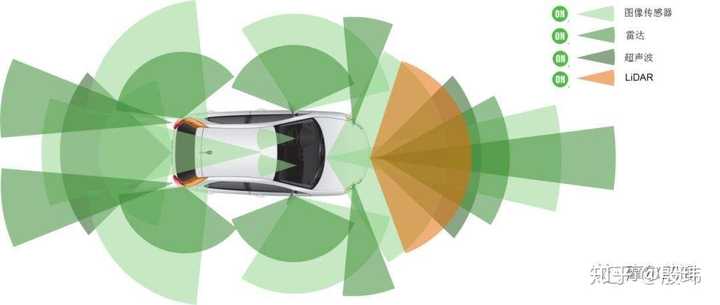
一个句话贯穿所有传感器:老司机需要更好的视野
钢铁侠 Musk 常说,要关注第一性原理。琳琅满目的智能驾驶传感器,有没有什么东西是他们共同的本源,是不是未来还可能因此出现新的传感器?我很赞同这个观点。了解本质才能预测未来。
那所有感知器官(人)/器件(机器)的本质是啥?他们都在接受或者发送不同类型的电磁波(部分机械波)。听着是不是很拗口?
这里给出我绘制的一张图解释自动驾驶传感器的示意图,你可以在很多地方看到这些内容,但这张图重点是希望更容易记住并理解现在传感器的现状,还要能够预测到未来可能的变化!
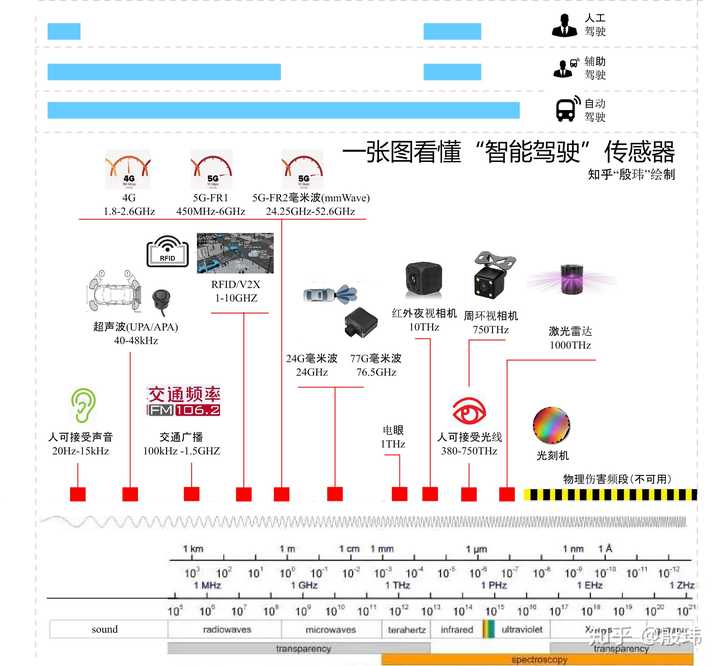
电磁波这个词,基本可以贯穿所有感知传感器,当然依赖重力(惯导)机械波(超声波)和化学的除外。不同频率的电磁波构成了你所了解到的激光雷达、毫米波雷达、相机、5G、甚至交通广播等各种自动驾驶、辅助驾驶甚至人工驾驶所存在的传感器,有些可以测距,有些可以获得可见光,有些可以承载信息流,是不是非常有意思。
看这张图,我们先看个大体。
1. (黄黑线)标注的电磁波频段我们一般在自动驾驶当中不会讨论,一个是这个频段会开始对人类产生伤害,比如伤害最低的紫外线,疫情期间,紫外线灯杀菌的时候会把小宝宝移走,就是这个道理。另一个方面,这类电磁波应用的特点就是成本极高(想想我们可敬的华为,不就是坑在了光刻机上嘛)。但理论上大家看 5G 和毫米波的发展就知道,频率越高可承载的信息就越多,测距也越准。
问:伟哥,那技术发展,未来是不是在这个频段内会出现新的传感器用于自动驾驶?
答:可能对你的安全会有点影响
问:为啥?这些传感器都是向外面向环境感知的啊。
答:你开在马路上,可能有一群遭受电离辐射变异成丧尸的准爸爸,追着你,骂说「你这车都让我的小僵尸宝宝流产了!」。这么看来你应该不是太安全。
2. 老司机都知道,开车什么最重要? 「视野」最重要。人类驾驶是视觉为主,偶尔会用下听觉,如图所示,频段覆盖并不多。但自动驾驶车为什么理论上可以更安全,本质是因为自动驾驶传感器覆盖了更多更多的频段。通俗点讲,人晚上看不见,雾天看不见,远了看不见,隔着墙的看不见,但这些人类看不见的东西,传感器都能看见。因此假设把这些原本不可接受的信息转化成人类可接受的方式给出来,比如(交通广播,辅助驾驶),驾驶安全性就上去了,这叫辅助驾驶。如果把全部这些信息给到电脑去决策,这个就是自动驾驶。不讨论信息的处理,仅从信息的输入来看,自动驾驶确实更加安全。
3. 频率越低(图越靠近左侧)波长则越长,传播的范围更广,所以更多的是面向通讯的应用,一般意义上频率越低,应用成本也越低,但承载的信息量也越少,所以可以看到 1G-5G,成本和技术难度都越来越高(是不是豁然开朗)。由于应用成本约低,所以辅助驾驶都是从超声波开始,逐步向毫米波,相机,激光来发展,并分阶段成熟。你可以看到现在车上都有超声波,稍微贵一点的车型开始有毫米波和相机,只有极少数目前有激光雷达,也是这个原因。(是不是又豁然开朗了)。
4. 频率越高(图越靠近右侧)波长则越短,传播范围较小(衰减快),但承载的信息量更多,也更有利于测距,因此更多的用于局部感知。在可见光频段附近的传感器承接了局部感知的主要信息来源。这里可以提前总结下,不同频率电磁波对于环境物体有不同特性(干涉,衍射,回波特性),比如毫米波对金属敏感,而激光对于物体表面更敏感,红外对于热量,相机对于可见光等等,不同的特性因此可以相互补充,进一步带来冗余,融合也因此变得重要。
5. 图的中间有很多空档,这也给新兴的传感器和通讯手段留出了空间,也预示了新传感器发展的机会。比如「电眼」(亚太赫兹接收器)介于毫米波和相机之间,可以轻易穿透雨雾进行成像,弥补了雷达分辨率和激光受雨雾干扰的影响,虽然没有成熟,但可以很容易洞见。5G的发展用到了毫米波频段,这个在图里可以很清晰的预见,哪怕它过去几年没有出现。这就是本质思考的作用(是不是又,又豁然开朗了)
总结:应用成本,传播范围,传播特性和信息承载量的不同,泛化出自动驾驶传感器技术丰富多彩的分支(是不是彻底顿悟了)
有这一层理解,对不同传感器的理解就更容易记住。下面对于各种传感器及其基本作用做出总结,这里不会过多展开,后期我会在专栏里同步展开对应的内容。
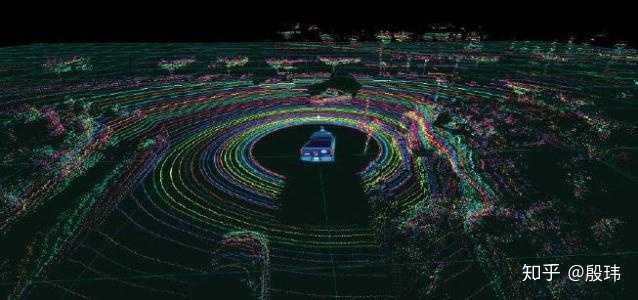
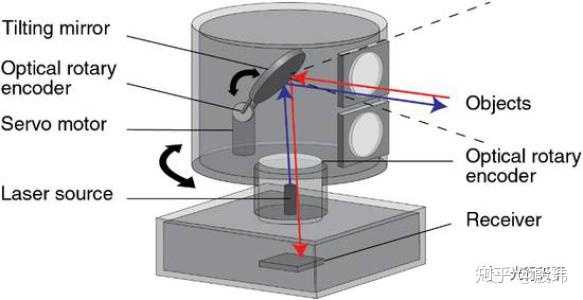
激光雷达
激光雷达的优势是测距准确分辨率较高,可以对物理尺寸有一个稳定的检测。但缺点同样明显,最严重的是工程化,虽然有固态激光雷达,激光寿命无法赶上整车质保的要求,且成本也尚未满足要求。另外感知距离准确虽然是他的优点,但同样也是他的缺点,在雨、雪和飞动的纸片等,其无法正确判断物体的属性。
司机:下雨天,我要做乘风破浪的老司机
激光:我靠,车前面一堵墙,靠,又一堵墙,心累
考虑激光雷达的成本和性能,目前 L4 级别自动驾驶使用较多
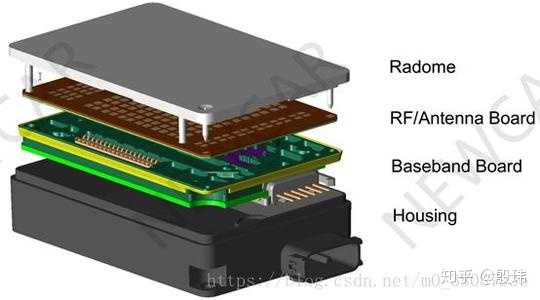
毫米波雷达
毫米波雷达,原理上用了「多普乐」效应,简单说有一辆消防车「嘀咚嘀咚嘀咚」地从你身边擦过,你如果闭着眼睛也可以判断它的接近和远离,那很好,你已经是一枚优秀的毫米波雷达了。他的优势是相对速度估计的非常准确,距离和角度也尚可,对激光雷达畏惧的雨雾不敏感(回想下上文说的频段),另外作为一个量产已经非常成熟的传感器,在目前中价位车型上用得已经非常多了。但缺点同样明显,虽然已经开始研发部署 4D 毫米波雷达,但是分辨率仍然赶不上相机和激光,另外对于金属敏感同样即是优点也是缺点。还有一个特点由于依赖「多普勒」效应,当和物体相对速度为 0 时,无法检测。但这个特性用于 ADAS 系统是完全够了,因为没有相对速度也就没有危险。
司机:开过一个窨井盖
雷达:靠,有个静止车辆,要撞上了!
司机:路过一个指路牌
雷达,靠,又一个静止车辆,师傅您够胆!
司机:稳定跟着前方一辆车
雷达:欸......终于前面没东西了

超声波雷达
超声波雷达是量产最多的雷达系统,虽然检测距离较短(回想下频段,虽然它传播远,但由于衍射厉害,过远无法得到足够的回波),但价格便宜,检测总体来说稳定,但只限于一维变量(距离),量产车几乎是标配,当然忽略丰田卡罗拉。一般分为 UPA 和 APA 两种,UPA 范围广距离短,主要用于前后泊车(深蓝色),APA 距离长,范围窄,主要用于侧向碰撞,别小看这个传感器,Tesla 的 Autopilot系统的发展,给了 APA 第二春的机会。


视觉相机/红外相机
钢铁侠最爱的传感器,的确也是所有传感器里话题最多,也最有潜力的传感器。由于摄像头的感知和人类几乎一样,因此深度学习算法在摄像头里的应用也是最多的。目前量产车,摄像头的技术也非常成熟,成本低廉,主要成本都来源于软件。因此谁视觉的软件做的好,那它就是自动驾驶的王者,软件如果做得不好,相机就是个战五渣。虽然视觉也有和人一样的问题,对于黑暗,炫光等都无法很好地处理,但其分辨率优势和隐含的信息量,理论上可以解决任何问题,毕竟我们人也依赖视觉。
司机:你觉得车前头这个女生好看不?
相机:你对着锥桶自言自语啥?

另外必须提一句的是夜视摄像头,由于成本很高,仍然无法满足量产大规模部署的要求,但由于其基于红外技术,在夜间昏暗无光情况下,仍然可以正常工作,虽然色彩信息没有传统相机那么大,但潜力仍然巨大(也因为其接收的是物体发出的红外信号)

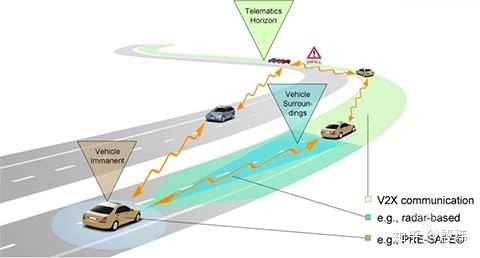
5G/V2X 地图
5G 通讯,V2X 车联网通讯,高精度地图,这三个放在一起讲,原因是,它们不同于其他传感器,它实际属于通讯和数据的范畴,重点不是物理实体本身,而是传递的信息流。真要比喻属于你自己过去的驾驶记忆(众包地图),别人画了图告诉你的信息(高精度地图)或是刚听来的八卦消息(5G/V2X),这些都属于外部信息的输入,只是地图保存的是静态的信息,而 V2X/5G 沟通的是动态的信息 。这些外部信息最大的优点是可能承载巨量的你无法通过自己感知获得的内容(鬼探头的熊孩子,前方拥堵信息,远程车辆操控)。别人都说爱听八卦的人,在公司活的长不是吗?局部感知总是有限的,通过获得这些信息,你可以提前做出预判,像是有一个好的战友在你背后,支持你。
但是,但是,战友在背后也可以捅死你不是嘛。。。这类传感器最大的问题就是容易被篡改和入侵,由于系统依赖外部巨大的支持,任何漏洞被利用都可以对车辆造成破坏,因此车辆网络安全核心就是应对这些传感设备的修改。感知仍然重要,车联网也不能过多地依赖。
司机:黑夜中,看着导航,一脚油门,飞到了河里
地图:在我的记忆里,那里本是路,可能雨下得多了,变成了河。

GPS 接收机
GPS 这个大家不陌生,没有这个东西,所有的自动驾驶地图数据都无法正常工作。没有把他放在一张图里,因为实际上 GPS 是一个通讯系统上的再开发用于获得地球上的绝对定位,是一个非常庞大而复杂的系统工程。目前大部分车型和智能手机基本都配置了低成本的 GPS,L4 级自动驾驶这个传感器也是标准配置,且没有其他传感器可以代替它。自动驾驶车需要厘米级别的定位,才能满足功能要求,但实际上 GPS 是非常脆弱的一种传感器,和 V2X 很像,因为他是一种通讯,而不是物理的感知过程,因此很容易被欺骗。
老婆:你这个混蛋,我看你手机定位,咋么在按摩店,你在干什么!
老公:公司埋头工作的老公,默念,你信 GPS 个鬼啊,我给你视频直播。。


惯性导航
惯性导航器件,简称IMU,是一个特殊的存在,其主要通过惯性测量(MEMS惯导)或者光相位干涉(光纤惯导),测量物体的相对位置变化(位置航向)。这个传感器类似于人的小脑,对所有刚才所说的传感器都有作用。所有传感器都有运行的时间间隔,在这个间隔之内没有感知输入,而车辆相对位置的感知,可以帮助所有感知信息进行短距离的推导,在时间维度扩展所有传感器的作用。并且由于其基本不受外部环境的干扰(不像其他传感器)因此属于传感器队伍里当之无愧的第一辅助。
东风导弹内部一般都会有一个高成本光纤惯导,蒙眼狂奔也可以命中目标,无论你干扰GPS还是改变环境。
总结
感知第一篇,主要到这里,核心就是一句话,通过不同的电磁波的接受和发射,一个智能体感知到了这个世界,自动驾驶车获得了比人类更多的信息量,因此有了更为安全的潜力。但是由于传感器有的情况靠谱,有的情况非常不靠谱,因此感知融合就非常重要,那后面就要聊一下,软件定义汽车,如果让这些传感器连接物理大脑(域控制器)从而让自动驾驶可以思考。以及具体实现这种思考的技术又是什么。